Робот спот микро своими руками
Добавил пользователь Morpheus Обновлено: 10.09.2024
КАК СДЕЛАТЬ РОБОТА:
СХЕМЫ, МИКРОКОНТРОЛЛЕРЫ,
ПРОГРАММИРОВАНИЕ РОБОТОВ
Робототехника для начинающих. Как сделать робота в домашних условиях своими руками.
Как сделать простого робота и мини робота с программным управлением.
Программирование микроконтроллеров AVR. Схемы роботов. Описания. Примеры программ.
Об инверсном подключении моторов и о простейшем поисковом поведении. Робот будет не просто следовать на свет, а при его отсутствии замирать, но будет пытаться искать источник света, поворачиваясь в его поиске, или следовать по границе освещенного пространства. Кроме того, мы рассмотрим, как сделать робота, следующего по линии, с одним датчиком без использования дополнительных микросхем.
Ритм жизни современного человека становится все более насыщенным и в его плотном графике становится все меньше времени на уборку собственного дома. В связи с этим в последнее время появляется все больше устройств, упрощающих наведение порядка в доме, одними из которых являются роботы-пылесосы, позволяющие в автоматическом режиме производить уборку пола в помещениях. У этих роботов-пылесосов достаточно много достоинств, но их существенным недостатком, сдерживающим их широкое распространение, является цена. Поэтому в данной статье мы рассмотрим создание робот-пылесоса на основе платы Arduino, который по функциональности будет мало отличаться от коммерческих моделей роботов-пылесосов, но стоить будет существенно дешевле них.

В составе робота мы будем использовать ультразвуковые датчики и инфракрасный датчик (IR proximity sensor). Ультразвуковые датчики будут помогать роботу избегать столкновения с препятствиями во время уборки помещения, а датчик приближения будет предотвращать падение робота с лестниц.
Ранее на нашем сайте мы уже рассматривали проект чистящего робота пылесоса на основе Arduino, но он был недостаточно совершенным и очень громоздким. Рассматриваемый в данном проекте робот-пылесос значительно более компактный и отличается более интеллектуальным алгоритмом работы. Также на нашем сайте вы поможете посмотреть похожие проекты роботов на основе платы Arduino:
Необходимые компоненты
- Плата Arduino Pro Mini (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 – 3 шт. (купить на AliExpress).
- Драйвер двигателей L293d (купить на AliExpress).
- Электродвигатели постоянного тока формата N20, работающие от 5 В, с кронштейнами для их установки – 2 шт. (купить на AliExpress - смог найти только на 6 В, на 5 В почему то не удалось найти).
- Переключатель.
- Регулятор напряжения LM7805 (купить на AliExpress).
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Инфракрасный датчик (купить на AliExpress).
- Перфорированная плата.
- Опорный ролик (колесо) для робота.
- MDF (из него будет делаться корпус робота).
- Портативный вакуумный пылесос (Vacuum Cleaner).
Внешний вид компонентов, необходимых для сборки данного робота-пылесоса, показан на следующем рисунке:

Портативный пылесос (Portable Vacuum Cleaner)
Для того, чтобы наш робот мог выполнять свою функцию по предназначению (то есть пылесосить помещение), в его составе должен быть портативный пылесос. Внешний вид подобного пылесоса показан на рисунке ниже. Этот пылесос имеет очень простой механизм. Он имеет три части внизу – небольшую камеру для сбора пыли, двигатель постоянного тока и вентилятор. Сверху пылесоса имеется контакт для подключения питания. Двигатель непосредственно запитывается от напряжения 3V (2 батарейки по 1,5 В формата AA) через простой выключатель. Поскольку мы будем запитывать все наше устройство от литий-ионной батареи 7.4V, мы можем отрезать провода пылесоса от его внутреннего источника питания и запитать его от напряжения 5V с нашей схемы. Таким образом, мы удалили все ненужные нам внутренности пылесоса и он стал выглядеть внутри так, как показано на следующем рисунке.

Ультразвуковой датчик HC-SR04

Для обнаружения роботом препятствий в нашем проекте мы будем использовать популярные ультразвуковые датчики HC-SR04. Принцип их работы достаточно прост: передающий модуль датчика излучает ультразвуковую волну, которая распространяется в окружающем пространстве, отражается от препятствия и улавливается (принимается) приемным модулем датчика, в результате чего на выходе датчика формируется импульс, равный времени распространения ультразвуковой волны до препятствия и обратно. Зная скорость распространения звука в воздухе, достаточно просто на основе этого времени определить расстояние до препятствия. Более подробно об определении расстояний с помощью данного ультразвукового датчика и платы Arduino можно прочитать в этой статье. Также на нашем сайте вы можете посмотреть все проекты, в которых для определения расстояния использовался ультразвуковой датчик HC-SR04.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.

Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.

Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
Сборка конструкции робота
Для спайки компонентов между собой мы использовали перфорированную плату. Эта часть работы очень проста, но к ней все равно необходимо отнестись с тщательностью. Для подключения платы Arduino pro mini мы использовали два контакта типа "мама" (female headers). После того как мы закончили пайку на перфорированной плате мы использовали соединительные провода для подключения ультразвуковых датчиков.
Изготовление корпуса для робота-пылесоса
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В коде программы мы не будем использовать никаких внешних библиотек, поскольку взаимодействие с датчиком HC-SR04 осуществляется достаточно просто. Первым делом в программе мы объявим переменные для взаимодействия контактами Echo и Trigger ультразвуковых датчиков. Первый датчик у нас стоит слева робота, второй – спереди, а третий – справа робота.
Создайте колесного многозадачного робота на новой плате micro:bit и из простых электронных компонентов, которые есть у каждого кто занимается робототехникой на Ардуино. Проект признан показать, что плата micro:bit имеет все возможности платы Ардуино и даже больше. Тем самым демонстрируется богатый потенциал платы micro:bit в робототехнике.
2 Комплектующие
3 Программное обеспечение
Для программирования робота понадобится онлайн-редактор MakeCode
4 Инструменты для сборки
Возможно вам понадобятся некоторые инструменты для сборки робота:
- Набор отверток
- Винты, гайки
- Клей
- Паяльник
- Двухсторонняя клейкая лента
- Дрель
- Канцелярский нож
- Защитные очки
5 Сборка робота
5.1 Шасси
Сперва надо подобрать шасси для робота. Вы можете выбрать любое шасси, желательно трехколесное с двумя ведущими колесами и одним опорным колесом. Есть много довольно дешевых шасси для колесных роботов. В моем случае, я использую шасси от робота Max:Bot DFRobot, т .к. дешевого пластикового шасси под рукой не оказалось. Моя металлическая платформа абсолютно не отличается по функционалу от пластиковой, разве что выполнена из дюрали. Такой сплав крепче и надежнее пластика, что позволит выдержать вашему роботу самую суровую эксплуатацию.
Если вы хотите использовать мое шасси Max:Bot , то оно продается вместе с электроникой для сборки робота на сайте DFRobot.
Обычное пластиковое шасси можно найти на AliExpress или купить нашу платформу для робота РобоРовер М1. Мы используем прочный и упругий пластик ABS толщиной 4мм, который не треснет при легком ударе или при сверлении в нем новых отверстий. Наша платформа ничем не уступает металлической, и даже удобнее в экслуатации, т.к. имеет типовые крепежные отверстия и специально рассчитана на электронику, которая используется в этом проекте.
Вобщем, выбор шасси к роботу за вами.
Сегодня на рынке существует бесчисленное множество шасси роботов на разных вкус и разный размер кошелька.
5.2 Драйвер управления двигателями
Чтобы робот мог передвигаться, ему необходимы электродвигатели и драйвер, который бы умел управлять ими. В своих проектах я люблю использовать драйвер L298N. Он прост в использовании, но для его подключения требуется 6 выводов. 4 вывода цифровых для управления направлением вращения, 2 вывода цифровых ШИМ для управления скоростью вращению каждого из двух двигателей.

Драйвер L298N для новичка самый простой в использовании на мой взгляд.
Если вам критично использование выводов, то можете обратить внимание на драйверы к micro:bit управляемые при помощи шины I2C, тогда будет задействовано 2 вывода (SCL, SDA).
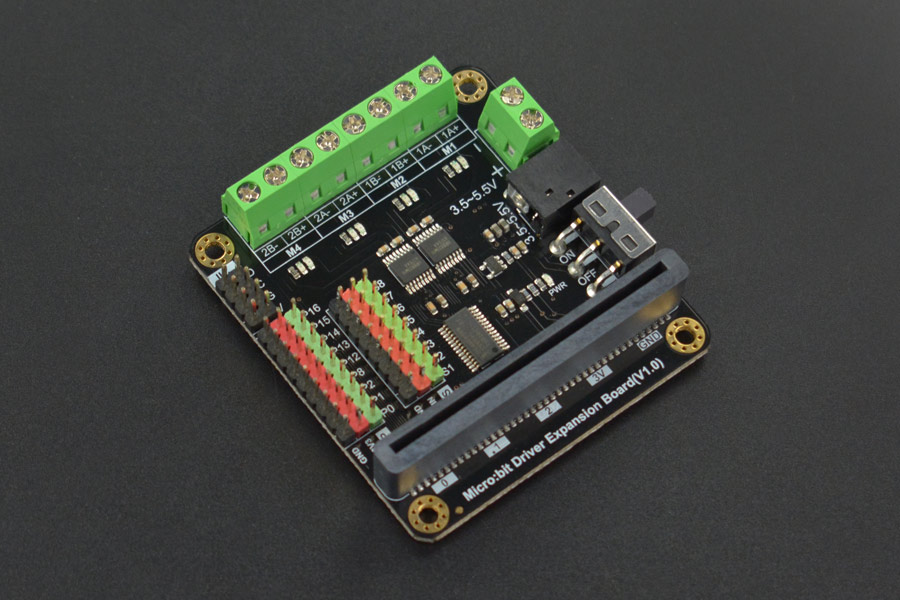
Например, плата расширения для micro:bit РоботБит. Может управлять моторами, сервоприводами, имеет встроенный электрический звонок и светодиодную ленту. Настоящий "швейцарский нож" в робототехнике на micro:bit. Если надо только управлять моторами по шине I2C ( без дополнительных функций ), используя micro:bit , то есть решение попроще от DFRobot мотордрайвер для micro:bit.
 |  |
Наш проект предполагает использование стандратного драйвера L298N, поэтому будем использовать его далее.
Установите драйвер на шасси робота вместе с моторами. К моторам предварительно припаяйте провода. В зависимости от того какое шасси вы используете может отличаться и процесс установки. Фотографии используются для справки и не совпадают с финальным проектом, т.к. я их взял из своего предыдущего проекта Ардуино-робот.
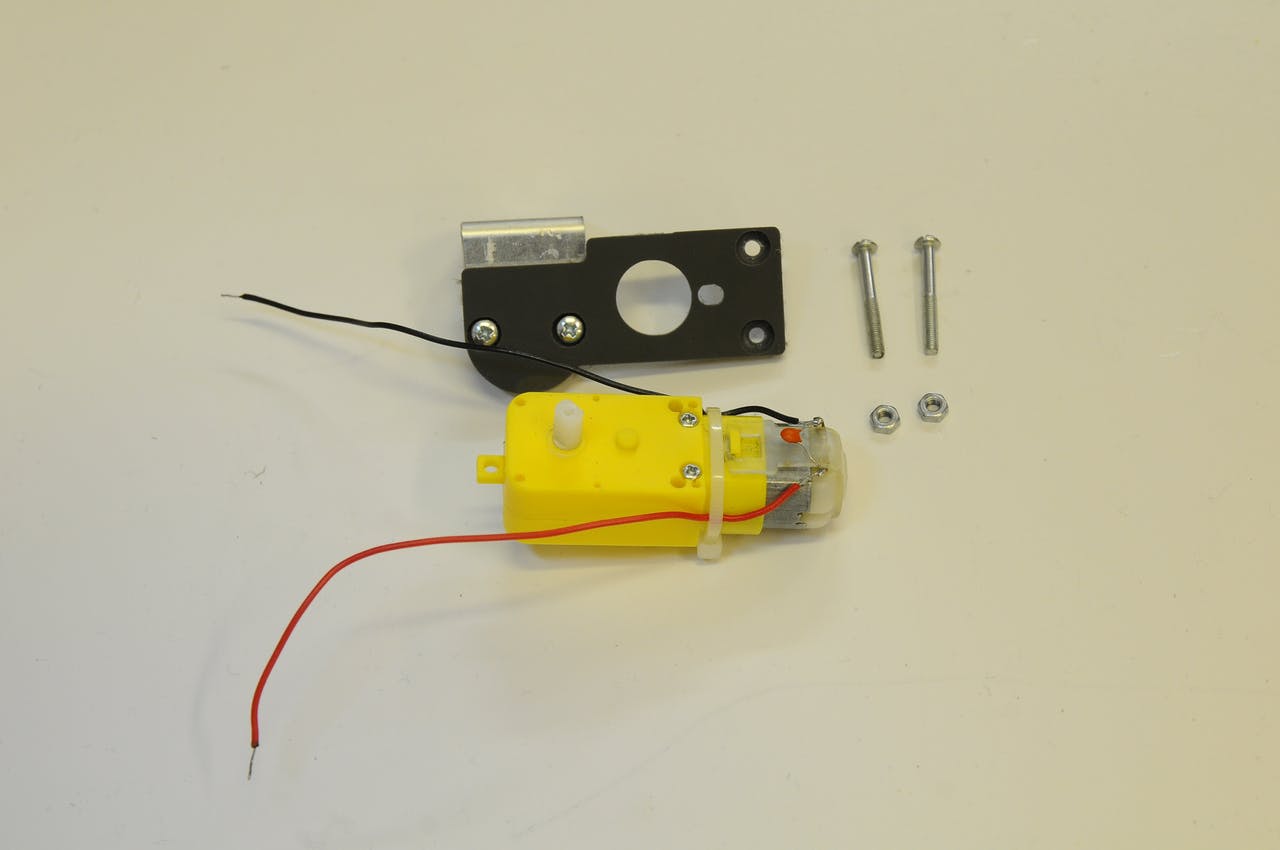
Мотор с припаянными проводами. В нашем проекте моторов два.
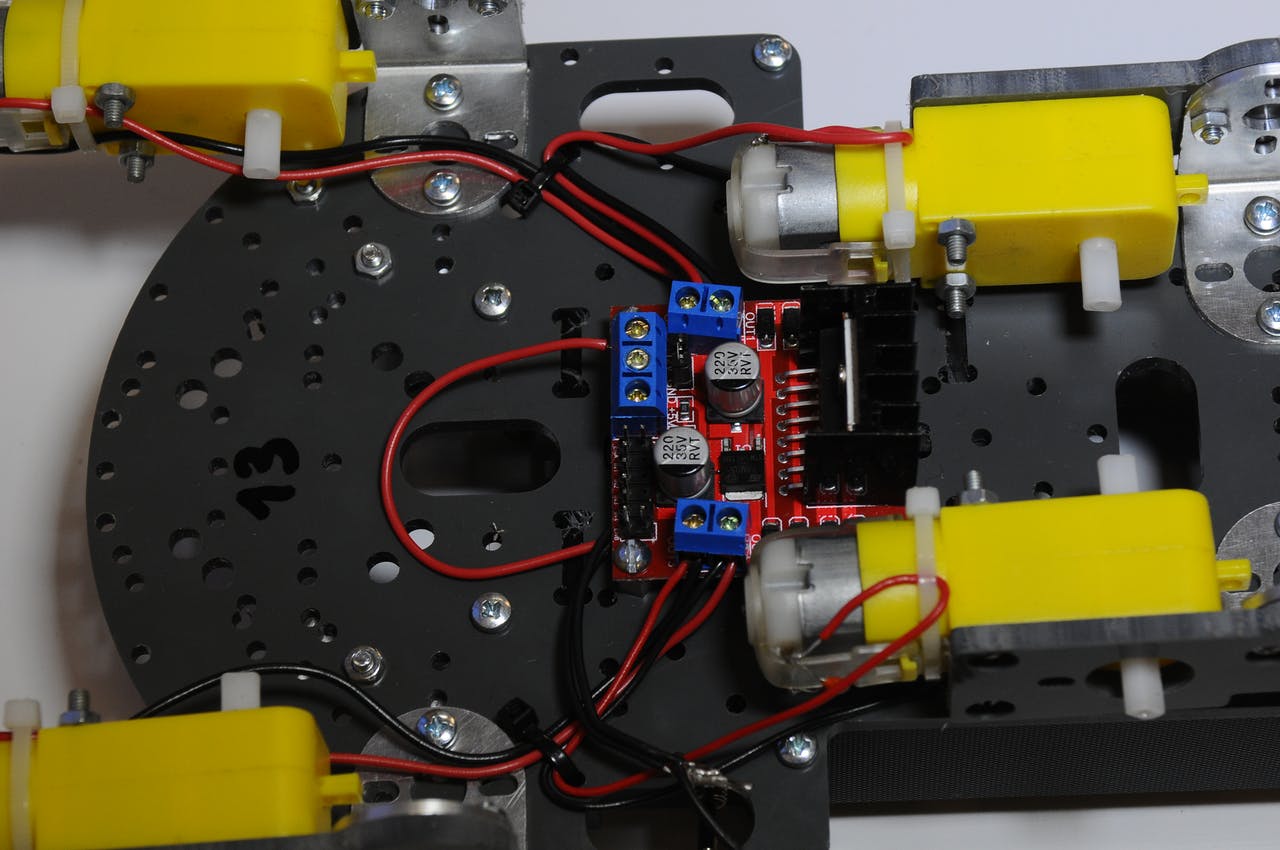
Драйвер моторов установлен на робота
5.3 Питание для электродвигателей
Если это ваш первый проект робота на micro:bit и вы незнакомы с литий-полимерными аккумуляторами, то самое лучшее питание на данный момент будут обычные пальчиковые батарейки АА. Для них необходим батарейный отсек на 4 штуки или 5 штук. Чем больше батареек, тем больше ток и производительность моторов, поэтому 5 штук батареек будет предпочтительнее, т.к. это 7.5В, а если 4 батарейки, то это лишь 6В. Используйте только новые качественные батарейки.
 |  |
Батарейные отсеки на 4АА и 5АА соответственно
В моем случае я использовал литий-полимерный аккумулятор 2S 7.4В. Высокий ток такого аккмулятора обеспечивает хорошую производительность электродвигателей. Однако, для такого аккумулятора потребуется специальное зарядное устройство и вольметр. Для новичка на первое время достаточно и батареек.

Небольшой литий-полимерный аккумулятор решит все проблемы с недостаточным напряжением и током

Профессиональное зарядное устройство подключено к аккумулятору. Быстро зарядит аккумулятор, но и дороже батареек
Все литий-полимерные аккумуляторы "боятся" переразряда. Во время использования к нему обязательно должен быть подключен вольтметр со звуоковой индикацией. Прозвучал сигнал, пора заряжать аккумулятор
Таким образом вы можете сами решить, стоит ли на данный момент покупать аккумулятор или использовать батарейки. Вот примерная стоимость оборудования для литий-полимерного аккумулятора:
Вольтметр 10 бел. руб.
Если использовать пальчиковые батарейки выйдет гораздо дешевле. Есть еще вариант с аккумуляторами АА, но они долго заряжаются в отличии от литий-полимерного аккумулятора. На данном этапе, используйте батарейки.
5.4 Питание для micro:bit
Питание платы не должно превышать 3.3В. Наилучший вариант -это 2 ААА батарейки в специальном блоке с разъемом для платы micro:bit.
Такой блок часто поставляется вместе со стартовым набором для micro:bit
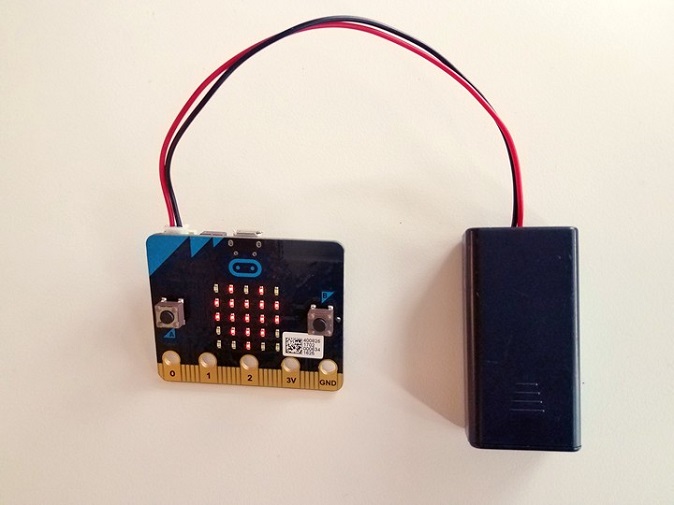
Вот таким образом происходит подключение к micro:bit.
Желатально, чтобы такой блок с батарейками имел встроенный выключатель для удобства использования
5.5 Выключатель
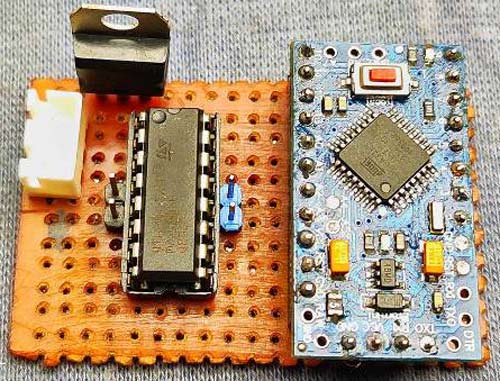
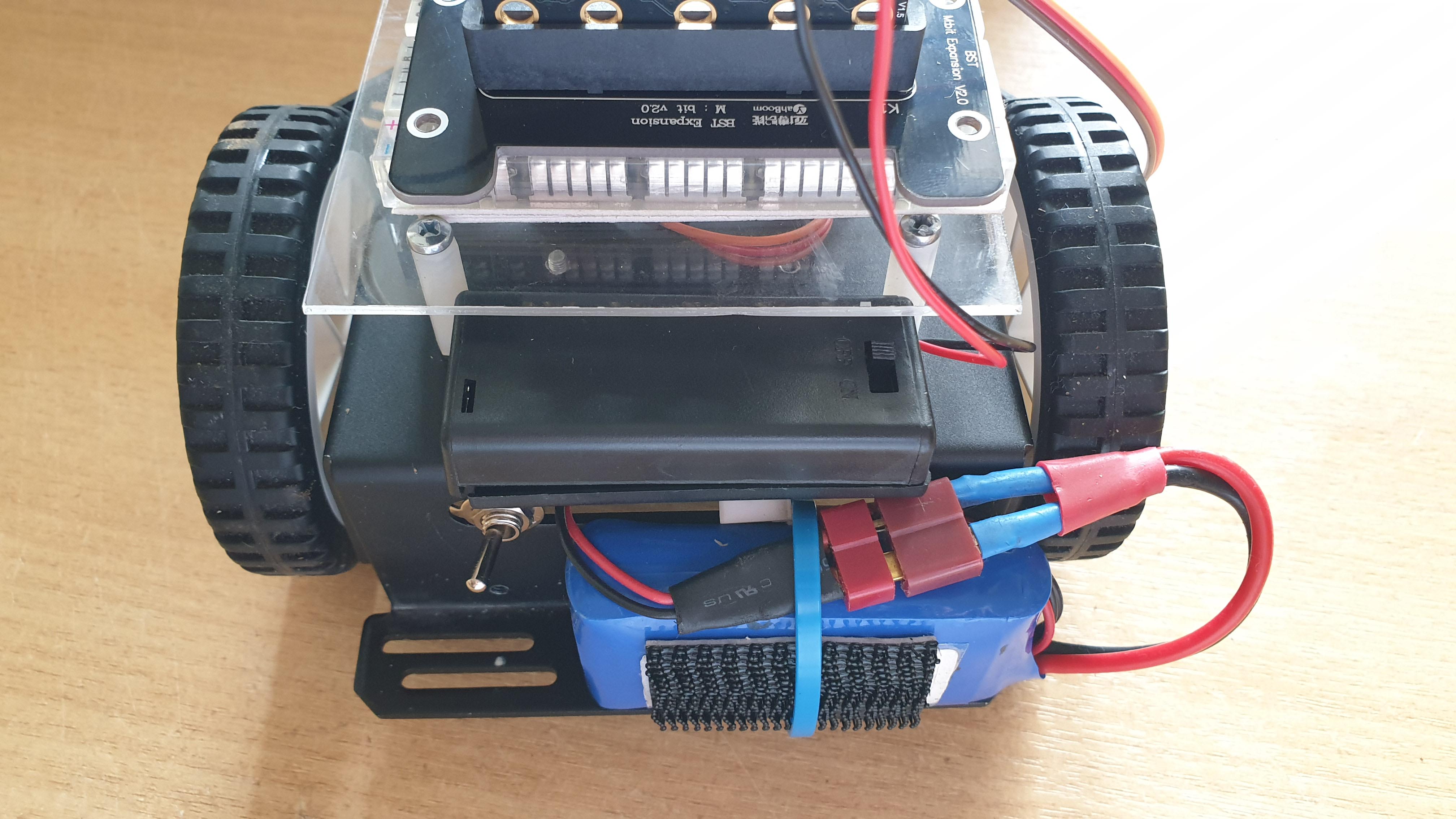
Чтобы батарею для моторов было удобно включать и выключать в цепь надо установить выключатель. В прошлом я сделал одну универсальную проводку для батареи и его включения к мотордрайверу.
Синий переключатель размыкает + батареи, красный провод от него идет к выводу +12V на мотордрайвере. Красный разъем -это коннектор для батареи, черный провод от него идет к выводу GND на мотордрайвере. Черный штекер не используется, он был создан, чтобы запитывать плату Ардуино от аккумулятора.
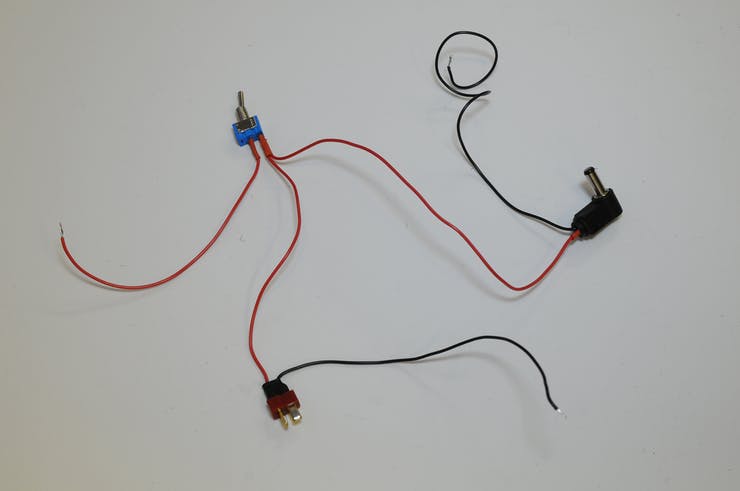
Моя стандартная проводка для роботов-машинок
Красный разъем называется T-Plug для подключения аккумулятора. Разные батареи имеют разные разъемы, я во всех роботах использую одинаковые разъемы, что обеспечить унифицированность проектов. Если батарея разрядилась, то можно отсоединить старую и подключить новую.
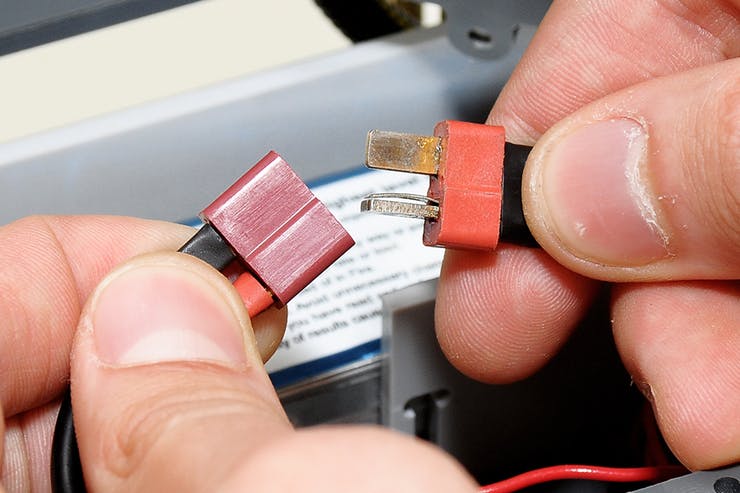
Слева коннектор от аккумулятора (мама), справа коннектор от проводки робота (папа)
5.6 Схема подключения компонентов micro:bit-Мотордрайвер-Моторы-Батареи
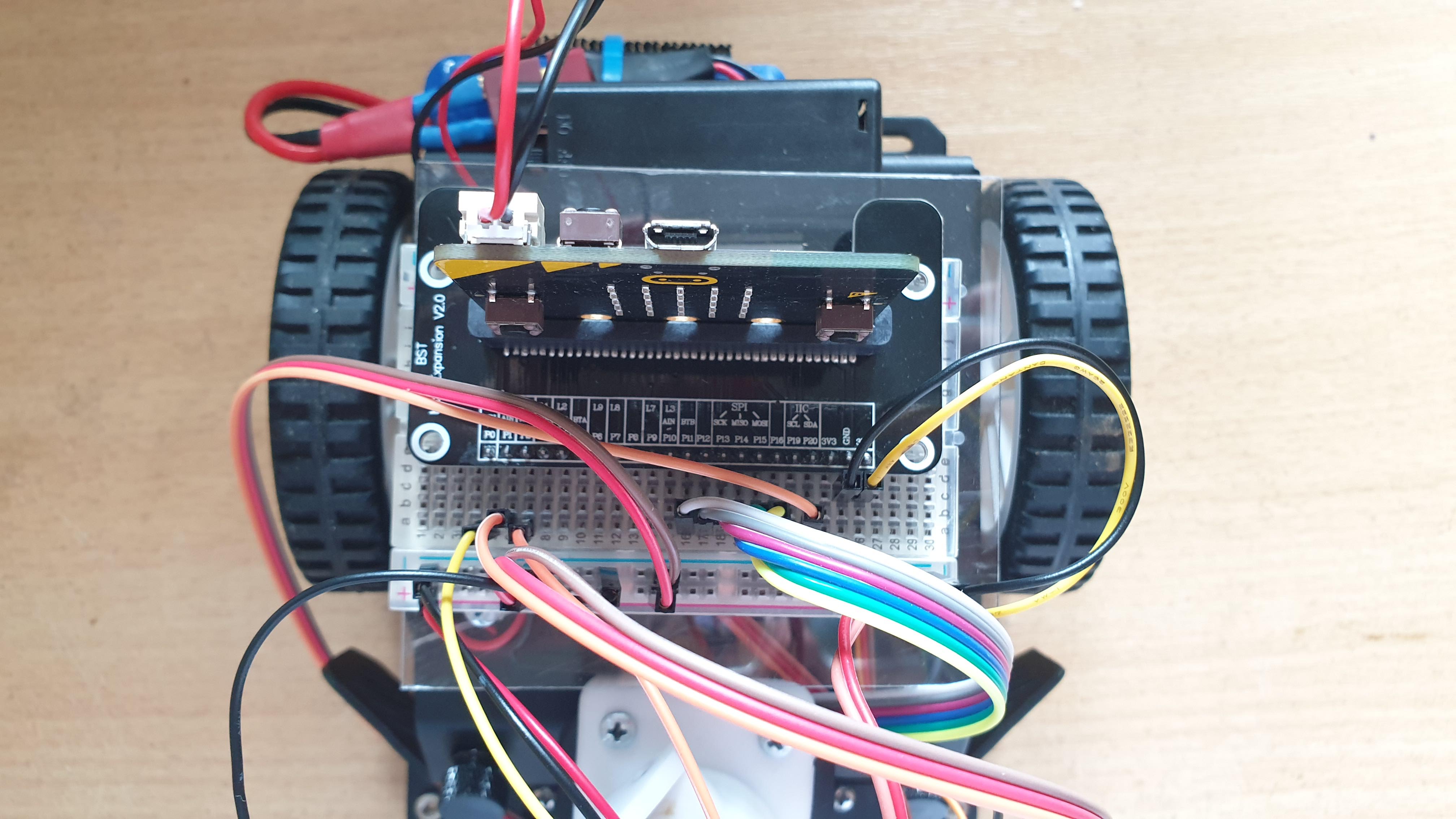
Вставьте плату micro:bit в плату расширения Yahboom. Как вы можете видеть, micro:bit не имеет гнезд как Ардуино, поэтому для удобного подключения к micro:bit датчиков необходимо использовать плату расширения, чтобы к ней можно было подключать провода или устанавливать ее на макетную плату. Далее, вставьте штыревой разъем платы расширения в макетную плату. Соединение должно получиться как на картинке.

На плате расширения вы можете увидеть, что каждый вывод подписан (не путайте выводы с макетной платой белого цвета). Для управления мотордрайвером нам понадобятся выводы P11, P12, P13, P14, P15, P16. Выводы P11, P16 задействуют ШИМ и будут использоваться для управления скоростью вращения электродвигателей, остальные будут находится в состоянии логический 0 или логическая 1, чтобы определять направление вращения каждого из электродвигателей.
Мотордрайвер также имеет штыревые выводы ENA, IN1, IN2, IN3, IN4, ENB, на мотордрайвере возле какждого штырька имеется соответствующая подпись. Соответственно, каждый вывод должен подключен в правильном порядке.
Для подключения используйте провода папа-мама. На макетной плате воткните штырь провода в строку возле подписи P11 платы расширения micro:bit, а гнездо провода соедините со штырем ENA на мотордрайвере.
Сделайте аналогичную процедуру с оставшимися выводами:
ENA ->P11 IN1 ->P12 IN2 ->P13 IN3 ->P14 IN4 ->P15 ENB ->P16
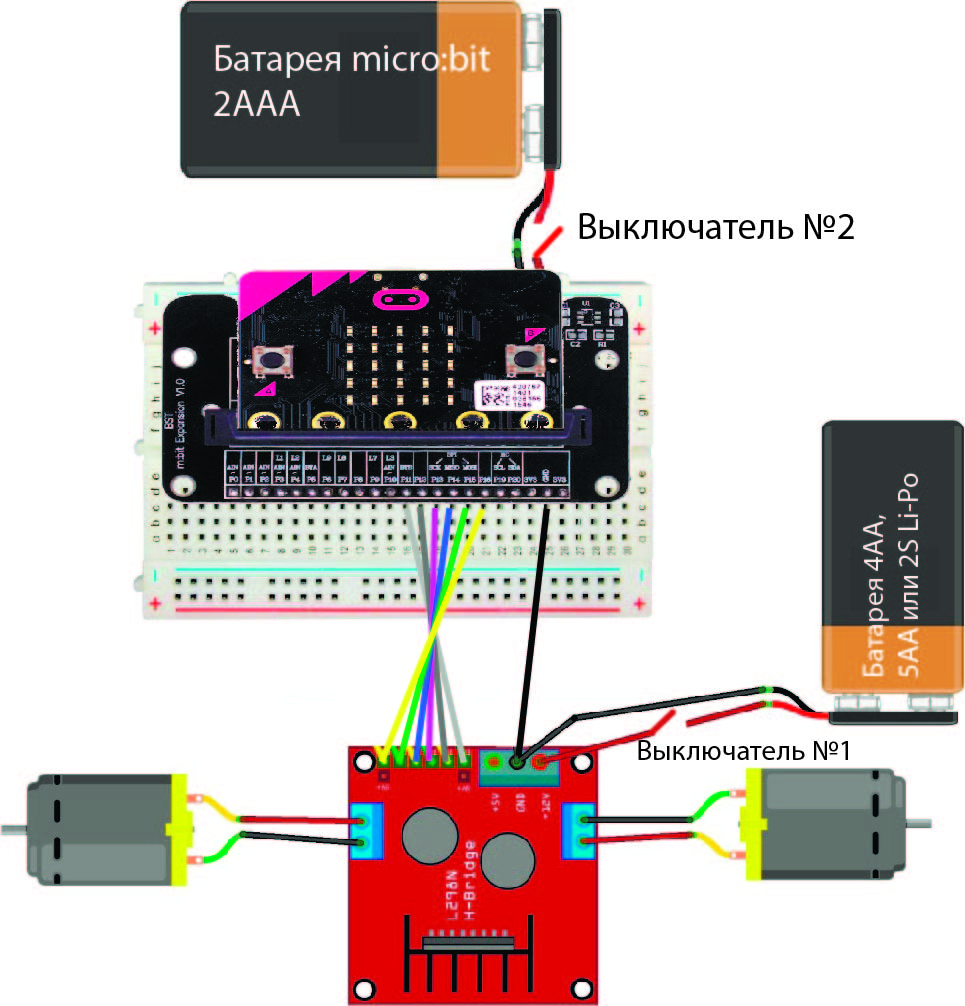
Схема подключения проводки для силовой электроники
5.7 Схема подключения датчиков линии
Возьмите 2 цифровых датчиков линии TCRT5000. Датчик является бинарным. Когда датчик находится над темной поверхностью, он выдает значение логической единицы, а когда над светлой поверхностью, то значение логического ноля.

Цифровой датчик линии TCRT5000
Используя провода папа-мама подключите датчики к макетной плате согласно схеме приведенной ниже. Также возьмите два провода папа-папа и подключите к гнездам 3.3V и GND, после этого подключите их к шинам + и - на макетной плате соответственно. Это расширит количество выводов для подключения питания к датчикам и другим модулям.
Левый датчик OUT ->P1 VCC(красный провод) ->3.3V GND (черный провод) ->GND
Правый датчик OUT ->P20 VCC(красный провод) ->3.3V GND (черный провод) ->GND
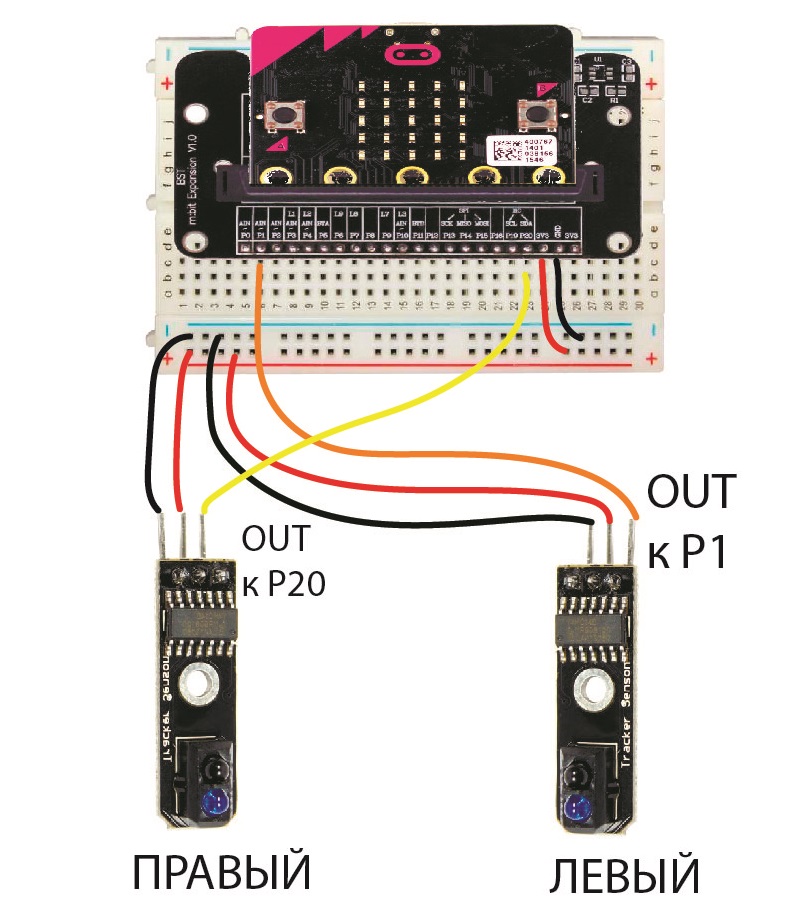
Схема подключения датчиков линии на роботе
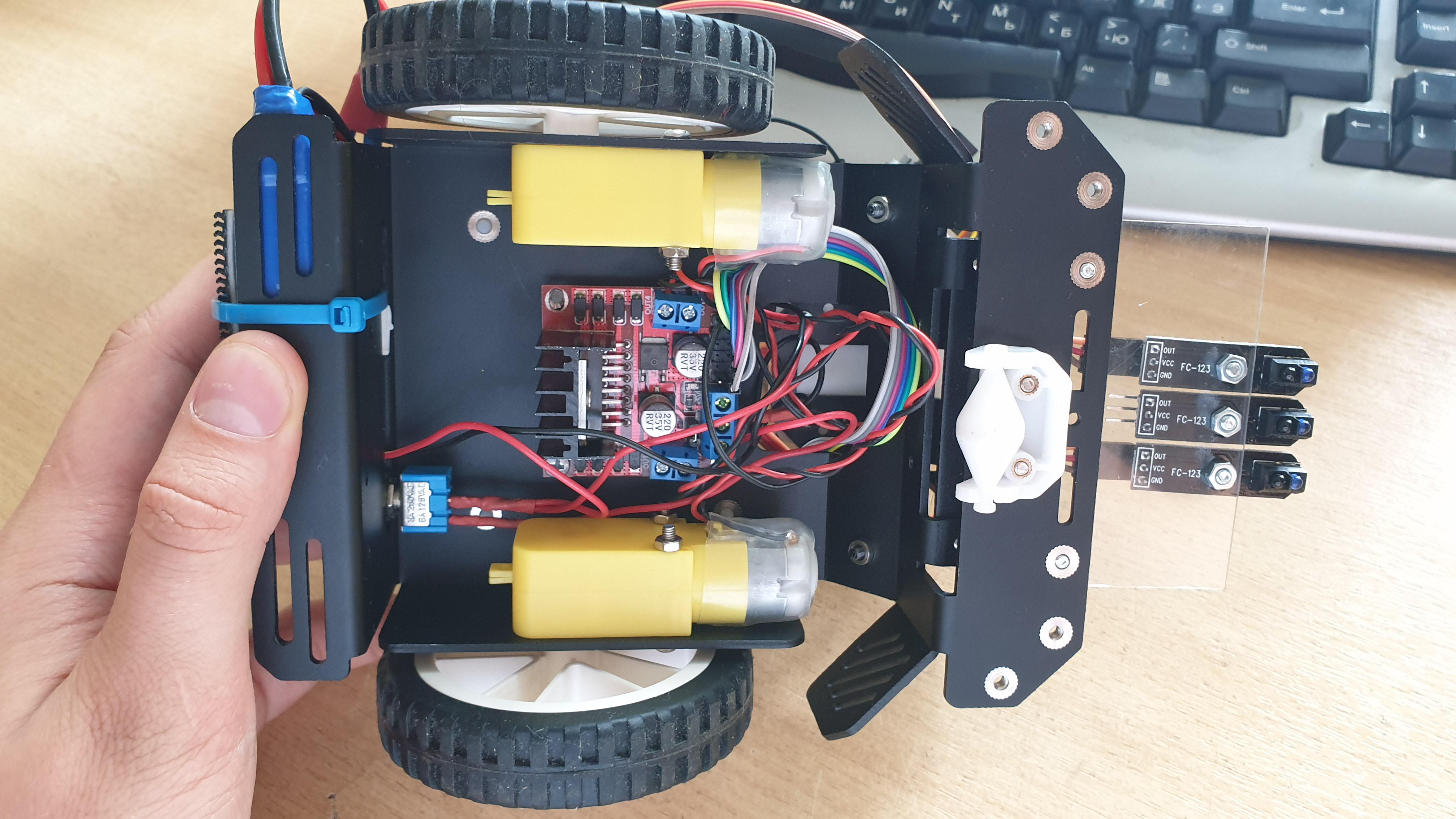
Следует заметить, что данные датчики имеют особенность сбоить, когда расположены слишком близко к друг другу. Например, на моей фотографии ниже показано, что робот имеет 3 датчика, но добиться нормальной работы, когда датчики так близко друг другу, не удалось. Поэтому было решено выключить центральный датчик и написать алгоритм под 2 датчика линии. Когда вы монтируете датчики, обеспечьте расстояние между краями печатных плат датчиков 5-10мм.
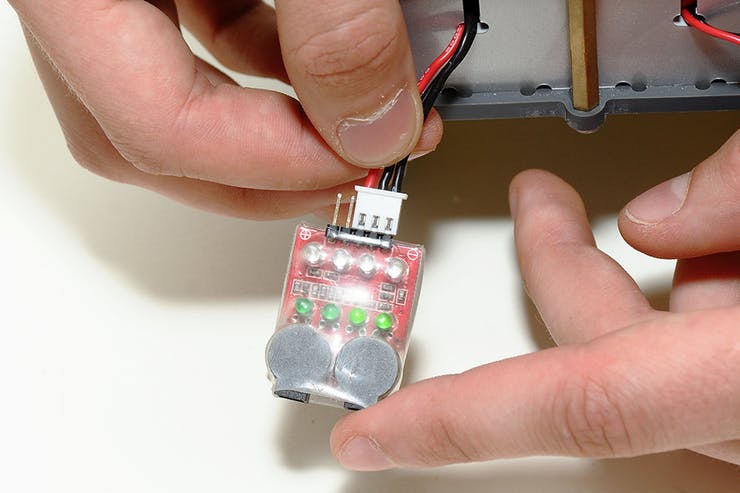
5.8 Схема подключения датчиков расстояния

Зависимость выдаваемого напряжения от расстояния
Обычный провод, который поставляется к этому сенсору не имеет специальных выводов, поэтому вам надо либо припаять к нему готовые провода со штырьками либо обжать провода, используя металлические штекеры.
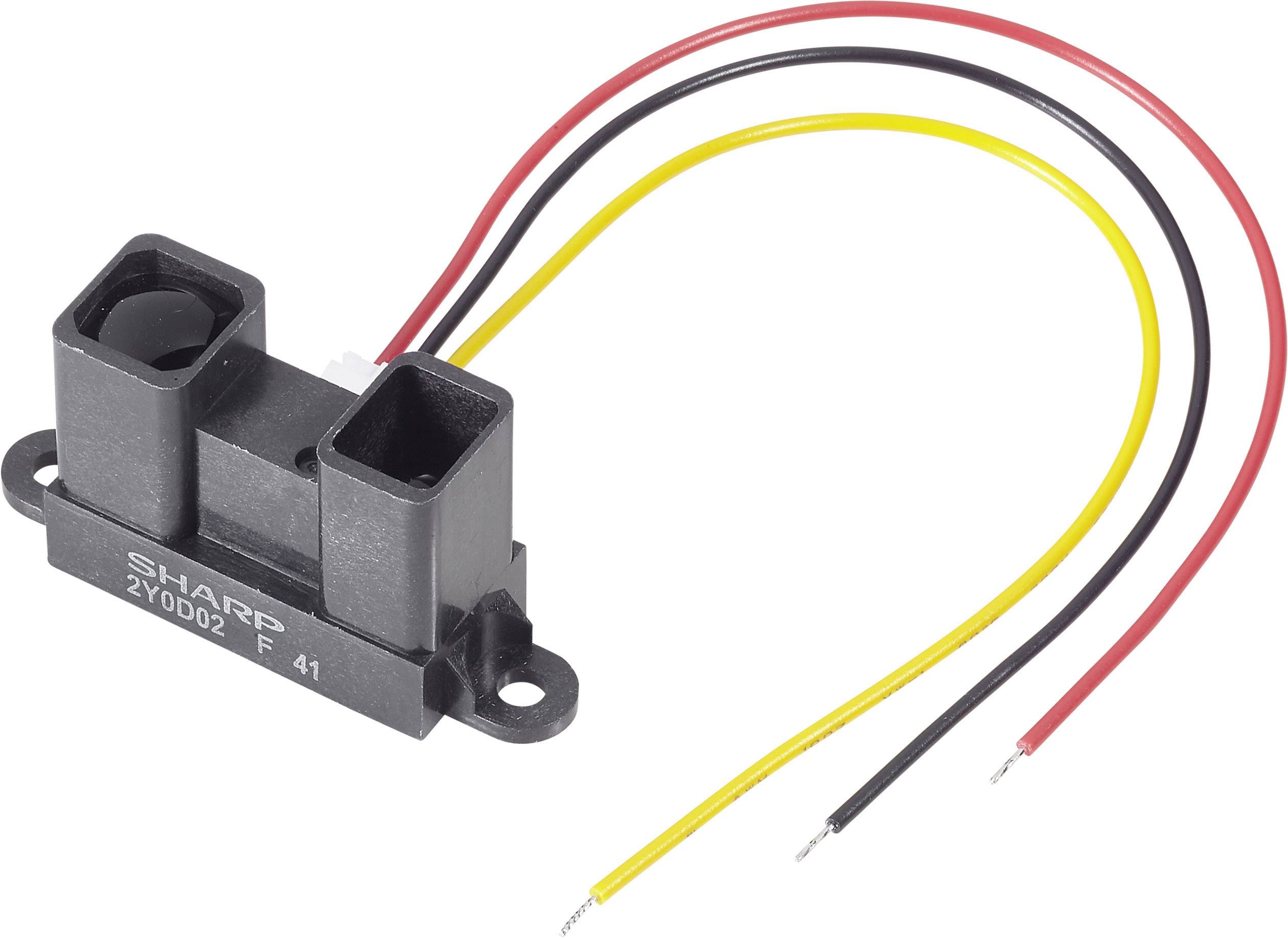
Датчик с подключенным к нему проводом
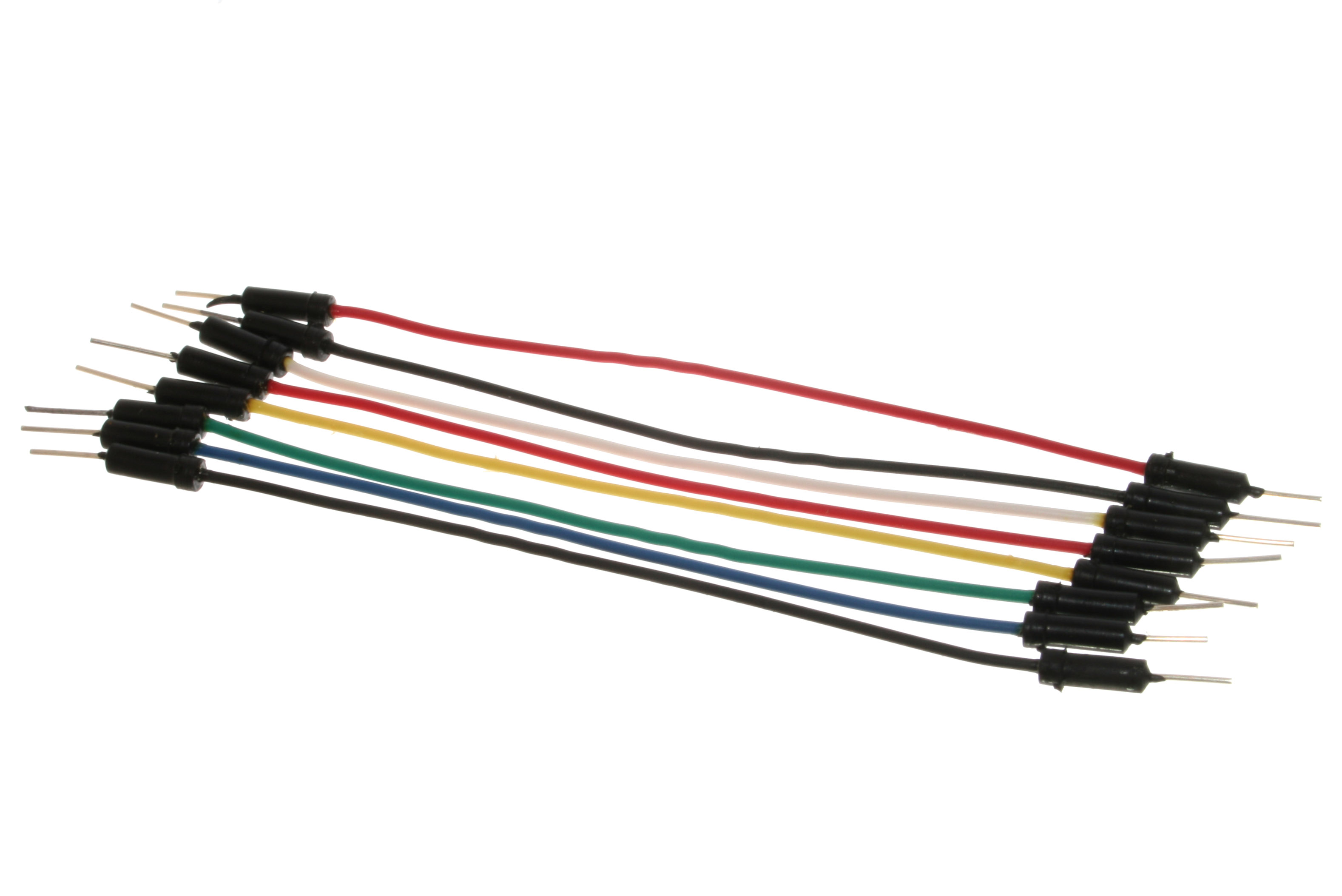
Первый вариант -это взять готовый провод, разрезать его и припаять к проводу датчика

Второй вариант -это взять разъемы-штырки и обжать их вокруг провода
Когда вы подготовили провод, можно приступать к подключению согласно схеме.
OUT (желтый) ->P0 VCC(красный) ->3.3V GND (черный) -> GND
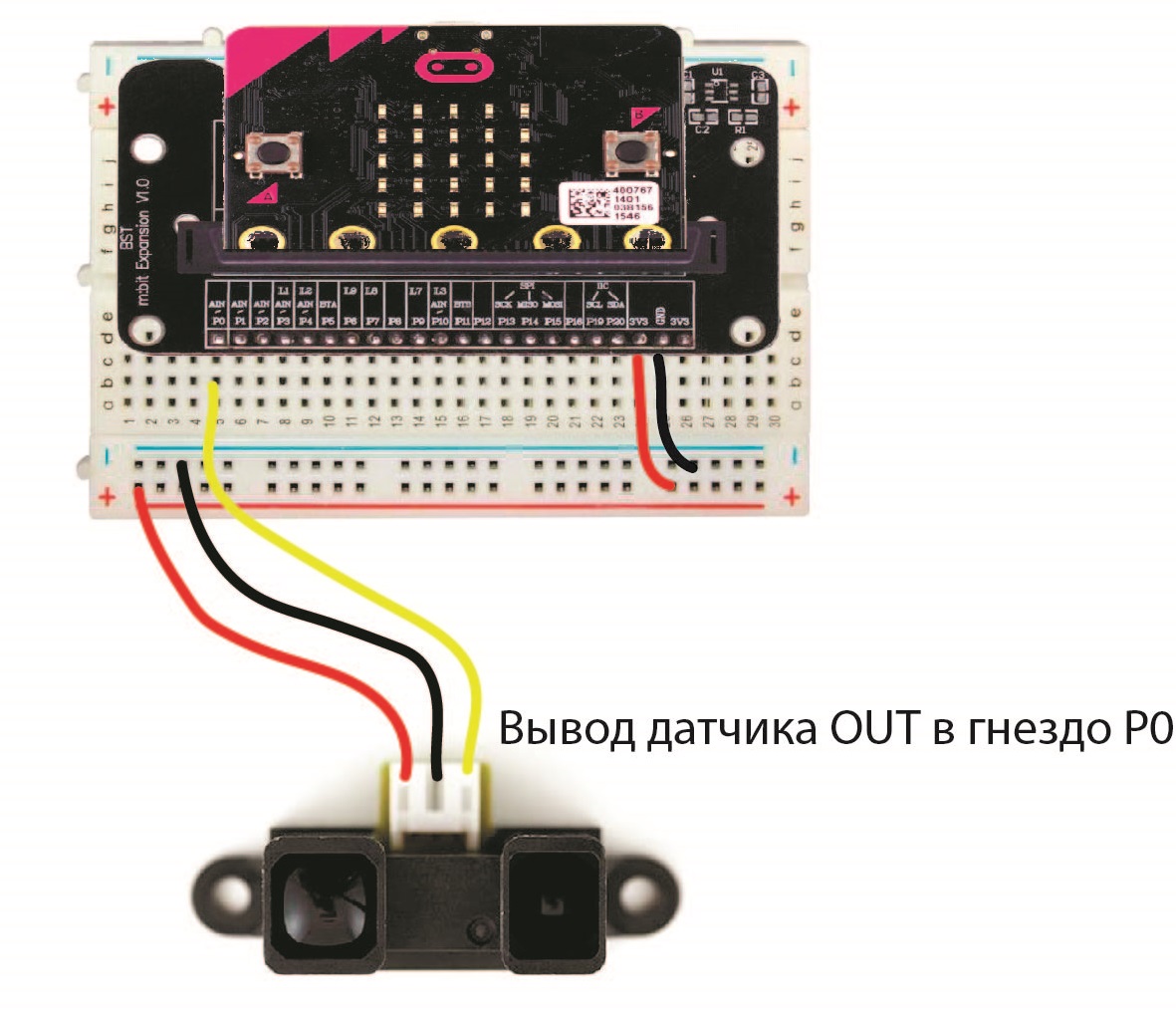
Схема подключения датчика расстояния
5.9 Схема подключения механизма Наклона-поворота
Такой механизм понадобится, чтобы поворачивать датчик расстояния и измерять расстояние в разных местах, после этого робот может принять решение в какую сторону ему двигаться.
Я использую для своего проекта механизм Наклона-поворота напечатанный 3Д-принтером (файла исходного у меня нет). Вы можете также спроектировать и распечатать свой или же купить пластиковый механизм для маленьких сервоприводов 9G (SG90). Такие сервоприводы потребляют небольшое количество электроэнергии и поэтому становится возможным питать их напрямую от платы micro:bit без дополнительного питания.
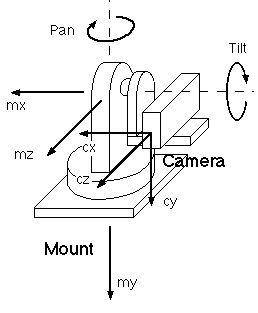
Схема типового механизма наклона-поворота
В нашем проекте будет использоваться лишь одна поворотная составляющая, чтобы поворачивать датчик. Механизм наклона использоваться не будет и сервопривод отвечающий за наклон будет выключен, но вы можете его включить и добавить в программу.
Используя провода папа-папа подключите сервопривод поворота в горизонтальной плоскости к определенным гнездам на печатной плате.
OUT (оранжевый провод) -> P2 VCC (красный) ->3.3V GND (коричневый) ->GND

Схема подключения сервопривода
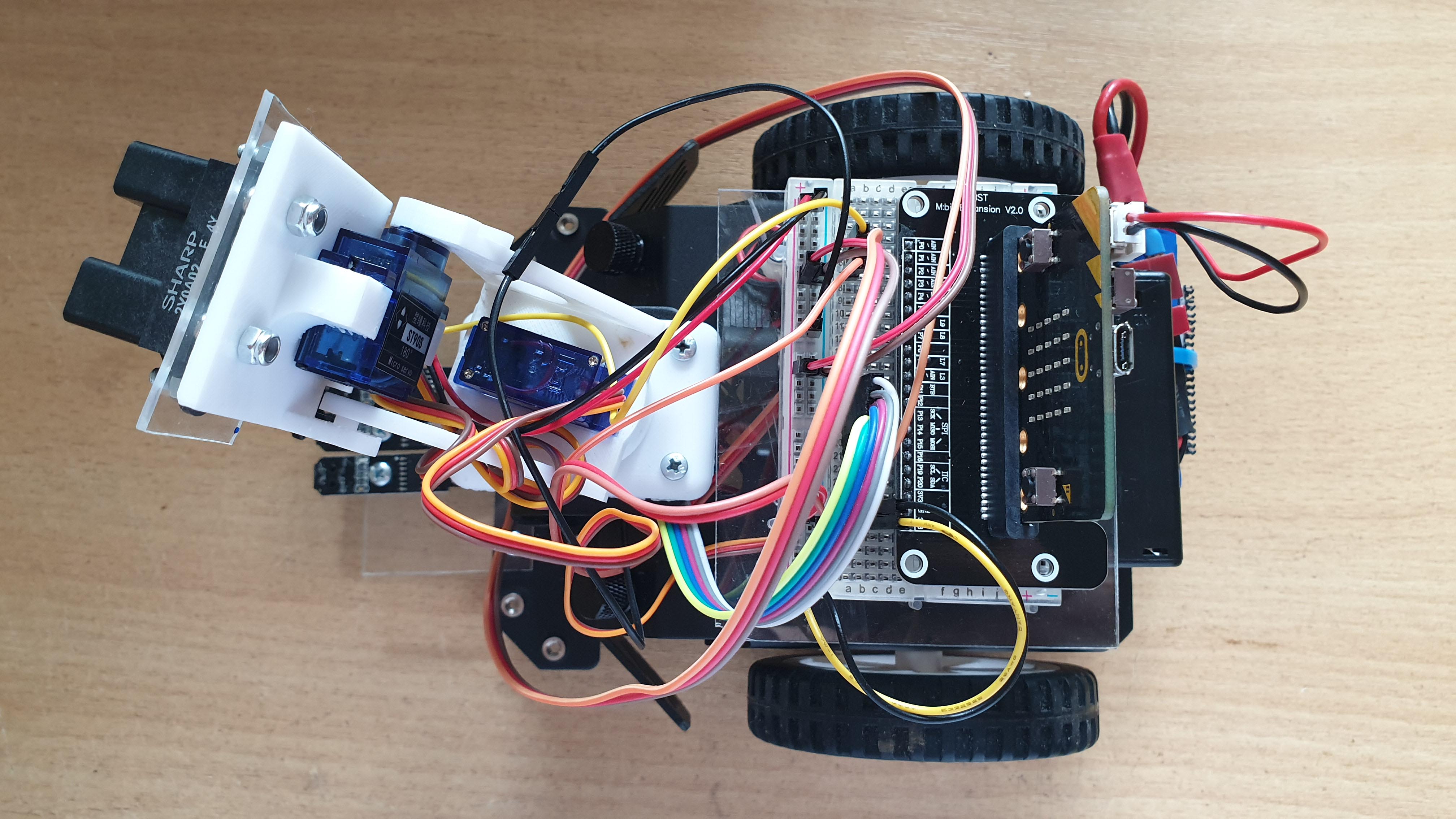
5.10 Проверка подключений и сборки робота
Вполне возможно, что ваш робот будет отличаться от того робота, который был собран мной. Поэтому доработайте свою конструкцию, ориентируясь на моего робота.
 | |
 |  |
6 Программирование
Также можно скачать код, нажав маленькую ссылку Download под этим окном.
Откройте онлайн среду MakeCode и импортируйте код в нее, нажав на кнопку Import и указав путь к .hex файлу.
6.1 Программа по огибанию препятствий при помощи датчика расстояния

Скачайте программу, нажав на большую фиолетовую кнопку Download и сохраните файл на micro:bit. Включите робота и моторы.

6.2 Программа движения по черной линии
Теперь надо удалить 3 блока из блока "forever" и поставить новый блок "call lineFollow". Он находится на рабочей области, перетяните его и вставьте в блок "forever".
Скачайте программу нажав на большую фиолетовую кнопку Download и сохраните файл на micro:bit. Включите робота и моторы.
Видео того, как робот начнет двигаться:
Используя мою информацию, вы построили своего первого робота на micro:bit. Изучите мою программу более внимательно, ее структуру, написание функций.
На нашем сайте есть большое количество интересных увлекательных уроков для micro:bit, ознакомиться с которыми вы можете по ссылке в нашем разделе Уроки.
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.

Читайте также: