Робот манипулятор своими руками пошаговая инструкция
Добавил пользователь Skiper Обновлено: 10.09.2024
В этом небольшом уроке для начинающих мы создадим устройство-контроллер и руку робота для разных целей.
Что хотим получить
Мы в этом скромном уроке мы сделаем контроллер, который будет зеркально управлять рукой робота. Такие полезные технические решения могут применяться в различных областях и несут в себе огромную пользу.
Часто подобными устройствами пользуются, например, военные при разминировании различных взрывных устройств.
Также, вполне возможно, что такого рода проекты могут дать толчек в развитии обучения искусственного интеллекта, когда робот обучается на основе действий человека, а после может сам повторять и применять полученные навыки.
Комплектующие
Ниже перечислим комплектующие, используемые в проекте:
Рука робота использует три обычных сервопривода ШИМ, а каждый угол управляется переменным резистором. Два серводвигателя DS3115 используются в вертикальном направлении, а сервопривод MG995 используется при вращении.
Схема соединения
Соединяем все комплектующие согласно схеме ниже.

Делаем руку робота


Предусмотрены отверстие и позиционирующее отверстие для завинчивания ручки поворотного потенциометра, а также выемка для вставки ручки.

Соберите вместе изготовленные детали и три поворотных потенциометра.
Поворотный потенциометр теперь расположен в том же направлении, что и ось вращения серводвигателя манипулятора робота.
Код Ардуино
Этот простой код ниже просто считывает значение вращающегося потенциометра с помощью аналогового пина, преобразует его в угол и передает на соответствующий сервопривод.
В завершение подключите поворотный потенциометр и подключите всё к Arduino.
Роботы-манипуляторы представляют собой обширный класс высокотехнологичных приборов, предназначенных для воздействия на объект методом перемещения, вращения или других манипуляций. Развитие робототехники привело к набору популярности этих устройств и существенному расширению модельного ряда, предлагаемого производителями. Однако собрать робота можно и в домашних условиях, особенно при наличии 3D-принтера.
Что такое робот-манипулятор?
Робот-манипулятор – устройство, которое используется в производстве для воздействия на объект. В большинстве случаев манипуляторы имеют параметры, схожие с способностями человеческих рук. Они могут быть как полностью автономными, так и входить в состав сложных роботизированных комплексов. Их фрагменты могут отличаться присутствием тех или иных механических узлов, которые ответственны за осуществление вращательных или поступательных движений.
Применение роботов-манипуляторов в производстве позволяет существенно оптимизировать процессы, сократив затраты и повысив качество произведенной продукции за счет сокращения числа ошибок, допускаемых на линии из-за человеческого фактора. Еще одним неоспоримым плюсом применения роботизированной техники на производстве является снижение нецелесообразной потери сырья и количества травм среди наемного персонала.
Применение манипуляторов позволяет не только поднять уровень производства, но и повысить доходность предприятия за счет снижения издержек и объема некачественной продукции.
Независимо от предназначения робота, конструкция манипуляторов является схожей и напоминает строением руку человека.

- плечо, представляющее собой статичную основу, на которую прикрепляются прочие детали и узлы;
- запястье;
- локоть;
- кисть.
Яркими представителями класса являются:
- LEGO Mindstorms. Представляет собой серию учебной техники, предназначенную для понимания принципов роботостроения в полном объеме – от этапа сборки, до программирования и последующего тестирования.
- Роботизированная система Vegebot, предназначенная для автоматизированного сбора урожая в сельскохозяйственной деятельности. Робот может самостоятельно убрать урожай с поля, подстроившись под тип овощей.
- KUKA LBR Med – робот-манипулятор, предназначенный для работы в медицинской отрасли. В его основу лег предельно чувствительный робот модели LBR iiwa. Предназначение этого робота – помощь в операционной.

Стоимость промышленных роботов-манипуляторов зависит от их предназначения, но крайне редко опускается ниже 150 000 рублей.
Как сделать манипулятор на 3D-принтере: пошаговая инструкция
Какие материалы и инструменты нужны?
Для самостоятельной сборки робота-манипулятора с помощью 3D-принтера понадобятся:
- Серво-моторы, например DYNAMIXEL AX-12A или SG 90 или 3 995(946). Количество зависит от планируемой мощности и предназначения робота. Их стоимость – от 6500 рублей за 1 штуку.
- 3D-принтер и пластиковая нить к нему.
- Плата Arduino Uno.
- Плата расширения Arduino Power Shield (цена – от 4000 рублей).
- Лабораторный источник питания (от 3500 рублей).
Также для сборки манипулятора потребуются:
- болты М6 25 мм и гайки с прорезиненной подставкой соответствующего размера;
- болты М4 40 мм;
- болты М4 30 мм;
- болты М4 20 мм;
- гайки М4 (с защитой от раскрутки);
- болты М3 20 мм и гайки с прорезиненной подставкой соответствующего размера;
- болты М3 10 мм;
- болты М4 20 мм;
- ось М4 60 мм с нарезкой;
- ось 32 мм с нерезкой;
- подшипник 606zz;
- шилд или макетка с соединительными проводами.
Как собрать манипулятор на принтере своими руками?
Сборку робота-манипулятора следует начать с распечатки деталей руки на 3D-принтере. Для этого потребуется разработать соответствующие 3D-модели или скачать готовые файлы в формате STL. Далее напечатанные части необходимо собрать и установить серво-моторы.
Когда рука будет собрана, необходимо установить управляющий модуль. Для этого потребуется:
- Установить Robot Operating System (ROS) – программу с открытым кодом, которая представляет собой совокупность инструментов и библиотек, позволяющих создавать приложения для управления роботизированной техникой.
- Для эффективной работы с ROS необходимо создать URDF-модель. Она нужна для полноценного управления рукой-манипулятором с использованием пакета MoveIT. Построение модели – ответственная задача, которая требует сосредоточенности и серьезных временных затрат. Все созданные ранее STL-файлы необходимо собрать в единый файл формата XML, опытным путем подобрав подходящие коэффициенты смещения деталей относительно друг друга. Когда процесс будет завершен, из URDF-файла будет создана конфигурация для работы с модулем MoveIT, которая позволит программировать движения робота и управлять устройством.
Настройка робота
Для настройки пользователю потребуется наличие ПК или ноутбука. При использовании ПК необходимо дополнительно установить плату для беспроводного подключения. Если соответствующий модуль не будет установлен, точка доступа не будет найдена.
Далее необходимо приступить к предварительной настройке серводвигателей. Сделать это необходимо до того, как они будут зафиксированы на робо-руке. Это обусловлено тем, что конструкция устройств предполагает наличие мертвых зон. Поэтому прежде чем они будут закреплены, их нужно запрограммировать на угол в 90 градусов для того, чтобы кран мог двигаться и вправо, и влево. После этого сервомотор захватывающей клешни следует выставить на нулевое значение, сомкнуть ее лопасти, а затем закрепить.
Как двигать манипулятором?
Движение робота-манипулятора обеспечивается платами Arduino UNO и Power Shield.
Один из моторов робота необходимо подключить к Power Shield и блоку питания, соединив data pin двигателя с 3 и 4 выводами платы. Именно data pin сервомотора используется одновременно для получения команд и ответа от устройства (связь мотора организована по протоколу Half Duplex Asynchronous Serial Communication).
Использование этого режима и объясняет подключение мотора к 3 и 4 выходам шилда одномоментно.

Для того чтобы двигать манипулятором, потребуется:

Преимущества
Манипулятор, созданный самостоятельно на 3D-принтере, обладает рядом достоинств в сравнении с готовыми моделями. К основным преимуществам относятся:
- Существенная экономия. Самостоятельная сборка робо-руки обойдется в 2–3 раза дешевле, чем покупка аналогичного устройства от производителя.
- 3D-принтер позволит максимально быстро создать компоненты для сборки манипулятора. Скорость трехмерной печати даже на самых простых устройствах, предназначенных для домашнего использования, достаточно высока. Пользователю не придется покупать запчасти у производителей и ждать доставку.
- Возможность напечатать детали сложной формы с учетом будущей функциональности робота.
- Самостоятельная сборка манипулятора с помощью 3D-принтера позволяет разработать модель устройства таким образом, чтобы она максимально точно отвечала поставленным требованиям.
Роботы-манипуляторы представляют собой технически сложные устройства, широко распространенные практически во всех сферах деятельности человека. Технология современной 3D-печати позволяет собрать подобный манипулятор в домашних условиях, напечатав детали для робо-руки на 3D-принтере. Самостоятельная сборка позволит не только существенно сэкономить, но и разработать модель робота, максимально отвечающую запросам пользователя.
Робот для подбора и перемещения предметов, управляя на расстоянии при помощи любого ИК пульта.
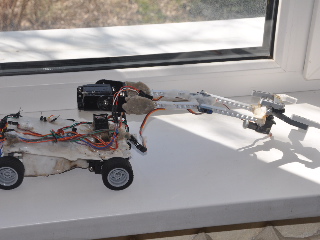

Вот уже почти год, как я занимаюсь робототехникой и электроникой. Вначале были простенькие робо-пауки на микросхемах, затем РУ модели машинок, обычные устройства для измерений состояний внешней среды. И вот, наконец, решил построить что –то намного серьёзнее и интереснее – робо-платформу, с радиоуправляемой рукой на ней! Но, как всем известно каждому роботу необходим отличный, высокопроизводительный процессор, из всех доступных вариантов самым подходящим является Микроконтроллер(PIC, Atmel и др.).
Сначала, я хотел приобрести ARDUINO в качестве микропроцессорного устройства, а также сенсоры и датчики DFROBOT. Но затем посчитав во сколько мне всё это с доставкой обойдётся – понял, что микроконтроллер лучше всего собрать самому, и всё это мне будет намного дешевле. Для выполнения этой задачи вполне сойдет микроконтроллер ATmega328P PU.
Прежде всего, для начала воссоздания именно такого робота необходимы будут:
1 - контроллер логики (ATmega328P PU);
2 - контроллер или драйвер двигателей платформы (l293 d или b, без разницы, обе подойдут);
3 - корпус для платформы и, соответственно, руки;
4 - остальные детали (пульт любой и двигатели).
Из выше перечисленного можно создать некоторую таблицу:
1.Контроллер (основной модуль).
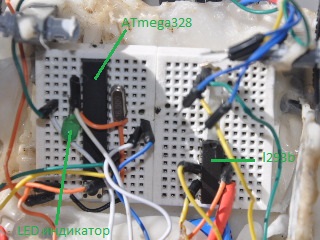
На основной плате находится сам микроконтроллер и драйвер, будут добавлены стабилизатор напряжения для сервоприводов и все соединения. Верхней части платформы будут расположены разъёмы для подключения по проводам ISP программатора. Для подключения питания остальных модулей, на плате имеется пара проводов подключаемых к разьему батарейки крона (+ -).
Принципиальная схема всех подключений:

Драйвер является посредником между электродвигателем и контроллером. Устройство выполнено на микросхеме l297B, что обеспечивает возможность использовать двигатели с током до 1 ампер, в случае использования драйвера на всю мощность, на стабилизатор напряжения необходимо установить радиатор.
Таблица: Управление двигателями.
В другую сторону
Принципиальная схема всех подключений:


3. ISP программатор.
В качестве программатора я использовал старую плату ARDUINO, но перед процедурой прошивки я вынул из платы микроконтроллер (для тех, кто не знает ОБЯЗАТЕЛЬНО).
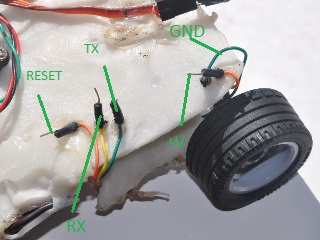
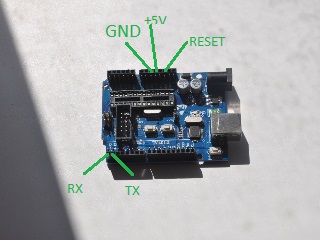
Для программирования необходимо присоединить все провода согласно надписям(на фото) и использовать Arduino IDE.
3. Стабилизатор напряжения (LM7805CT).
К стабилизатору можно подключать хорошие аккумуляторы выше 5 вольт, но самое главное чтобы ток был не меньше, чем 1000мА,
Если ток и напряжение аккумулятора будут выше то к стабилитрону лучше всего будет прикрепить радиатор.
4. Собираем корпус. Аппаратная часть.
Необходимые материалы:
Аккумулятор (я использовал 1500 мА, 7.4V)
два двигателя для платформы (я использовал две сервы пост. вращения)
4 любых сервопривода(для руки)
500г. поликапролактона
несколько деталек Lego для клешни
4-е колеса(тоже из Lego).
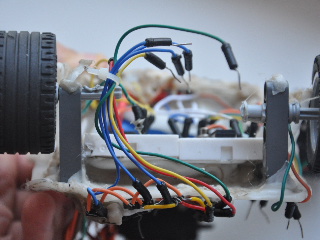
1) Сначала, нужно начать с изготовления основы. С задней стороны платформы можно расположить провода с сервоприводов.
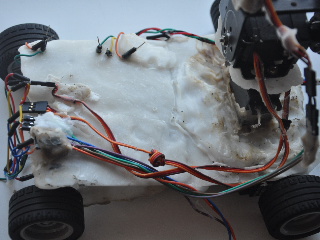
Расплавьте полиморф и раскатайте по стеклянной или металлической пластине, затем необходимы вырезать основу прямоугольной формы.Раскатывать желательно ровно и , пожалуй, можно воспользоваться скалкой. Мой пластик получился немного грязным , это потому что я его много использовал и к тому же плавил его паяльником в маленьких областях, чтобы быстро можно было заделать неудавшиеся участки.
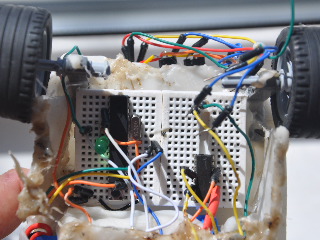
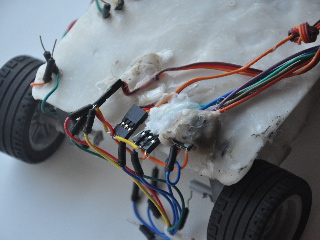
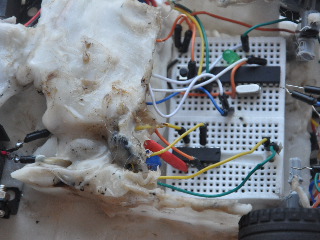
2) Макетную плату с контроллером стоит разместить в задней стороне основы, прикрепив все пластиком и припаяв:
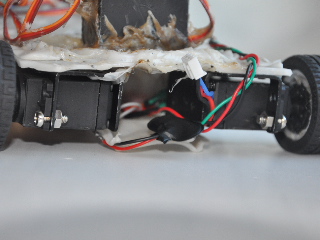
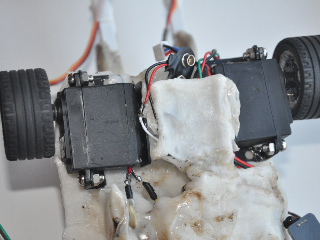
3) Двигатели для платформы стоит установить спереди и оставить место для батарейки кроны, питающей контроллер.
У меня моторы для основы являются сервоприодами постоянного вращения, а двигатели манипулятора:
2 х Сервоприводы на 6 кг\см
2 х Сервоприводы на 2 кг\см
Кабель, с синим, красным, черным проводами, выходит из аккумулятора для его подзарядки.
4) Колёса передних двигателей устанавливаются на их валы, а задних на детальки Lego Г-образные:
5) Основа внешне закрывается оставшимся пластиком.
6) Манипулятор делается в основном из Lego, но первые две сервы прикрепляются при помощи двух кронштейнов:

Основание манипулятора прикрепляется к остальной руке с помощью пластика,
Из деталек Lego, вы сами сможете собрать руку, может быть, ещё лучше, чем у меня.
Впрочем, делать руку можно хоть из чего угодно.
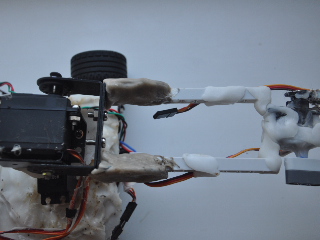
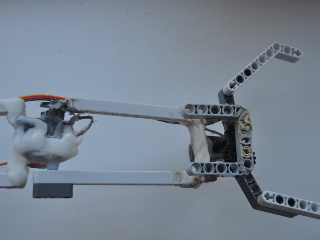
И, наконец, клешня делается при помощи микросервы и шестеренок.
5. Пишем программу. Программная часть.
Программа не сложная, включает в себя всего лишь две библиотеки, с комментариями.
В будущем программа будет упрощаться. Вообщем, с помощью этой программы можно будет управлять платформой и рукой дистанционно. При помощи кнопок можно будет изменять положение сервоприводов:
1) кнопки 5, 0 - схватить, разжать,
2) кнопки 2, 8 - опускать, поднимать всю руку,
3) кнопки 4, 6 - поворачивать влево, вправо весь манипулятор,
4) одна кнопка FUNC/STOP - отправка в исходное положение,
5) кнопка питания - включение серв,
6) кнопка паузы - отключение серв,
7) VOL+ и VOL- - вперед, назад,
8) перемотка - влево вправо,
9) стрелка вниз и вверх - изменение положения локтя манипулятора.

Я конструирую удалённо управляемых роботов. Стоит признать получается не совсем идеально, но постепенно они эволюционируют и с каждым разом становятся всё совершенней.
Последный робот был создан под давлением навящевой мысли "нам нужно больше силы". В результате получился неповоротливый железный монстр.
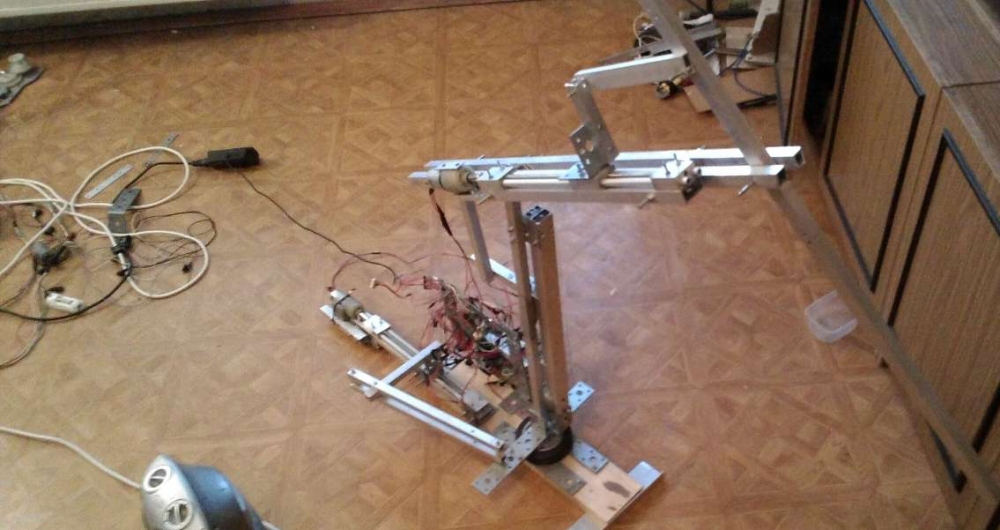
На прикреплённом видео, вы можете наблюдать за его работой. Принцип в общем прост: на страницу сайта транслируется видео с вебкамер и там есть кнопочки. При нажатии на них, приводятся в движение электродвигатели, отвечающие за перемещение определённой части конструкции.
Кстати у этой вундервафли был предшевственник.
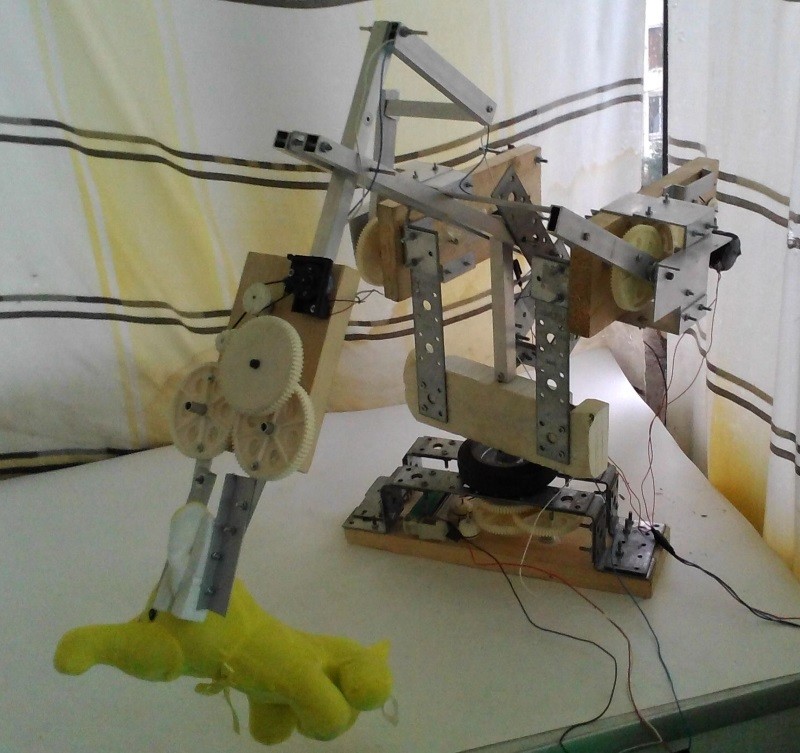
При всей бесполезности поделки, должен сказать было весело. Из одного сообщества ЖЖ народу набежало человек 700. Ты валяешся такой на диване, а они на твоём балконе слона истязают, иногда находясь даже в другой стране.
В общем надо совершенствовать аппараты. Ошибки осознал, и сейчас работаю над их исправлением.
Самодельный робот манипулятор на линейных приводах

Читайте также: