Регулируемый блок питания на шим 3528 своими руками
Добавил пользователь Алексей Ф. Обновлено: 08.09.2024
В этом ролике я покажу, как сделать из блока питания компьютера на ШИМ - контроллере FSP3528 зарядное устройство .
В этом ролике Я покажу как совсем просто сделать регулируемым блок питания на ШИМ FSP3528. Данный ролик .
Попал ко мне на ремонт блок питания FSP работающий на шим 3528 . Ремонт компьютерных блоков питания , на шим .
В данном ролике я поделюсь одним из вариантов изготовления корпуса для радиоэлектронных устройств и в общем .
Компьютерные блоки питания марки FSP на базе ШИМ контроллера FSP-3528 имеют хорошие характеристики и .
Этот ролик, как бы продолжение ролика о неудачной переделке. В этом ролика я покажу как очень просто и без особых .

С микросхемой FSP3528 приходилось встречаться в следующих моделях системных блоков питания:
- FSP A300F-C; -FSPATX-350PNR;
Но так как выпуск микросхем имеет смысл только при массовых количествах, то нужно быть готовым к тому, что она может встретиться и в других моделях блоков питания фирмы FSP. Прямых аналогов этой микросхемы пока не приходилось встречать, поэтому в случае ее отказа, замену необходимо осуществлять на точно такую же микросхему. Однако в розничной торговой сети приобрести FSP3528 не представляется возможным, поэтому найти ее можно лишь в системных блоках питания FSP, отбракованных по каким-либо другим соображениям.
Микросхема FSP3528 выпускается в 20-контактном DIP-корпусе (рис 1). Назначение контактов микросхемы описывается в таблице 1, а на рис.2 приводится ее функциональная схема. В таблице 1 для каждого вывода микросхемы указано напряжение, которое должно быть на контакте при типовом включении микросхемы. А типовым применением микросхемы FSP3528 является использование ее в составе субмодуля управления блоком питания персонального компьютера.
Микросхема FSP3528 является ШИМ-контроллером, разработанным специально для управления двухтактным импульсным преобразователем системного блока питания персонального компьютера.

Рис. 1. Цоколевка микросхемы FSP3528.
N
Сигнал
Bx/Bых
Описание
Напряжение питания +5В.
Выход усилителя ошибки. Внутри микросхемы контакт соединен с неинвертирующим входом ШИМ-компаратора. На этом выводе формируется напряжение, являющееся разностью входных напряжений усилителя ошибки Е/А+ и Е/А- (конт.З и конт.4). Во время нормальной работы микросхемы, на контакте присутствует напряжение около 2.4В.
Инвертирующий вход усилителя ошибки. Внутри микросхемы этот вход смещен на величину 1.25В. Опорное напряжение величиной 1.25В формируется внутренним источником. Во время нормальной работы микросхемы, на контакте должно присутствовать напряжение 1.23В.
Не инвертирующий вход усилителя ошибки. Этот вход можно использовать для контроля выходных напряжений блока питания, т.е. этот контакт можно считать входом сигнала обратной связи. В реальных схемах, на этот контакт подается сигнал обратной связи, получаемый суммированием всех выходных напряжений блока питания (+3.3V/+5V/+12V). Во время нормальной работы микросхемы, на контакте должно присутствовать напряжение 1.24В.
Контакт управления задержкой сигнала ON/OFF (сигнала управления включением блока питания). К этому выводу подключается времязадающий конденсатор. Если конденсатор имеет емкость 0.1 мкФ, то задержка при включении (Топ) составляет около 8 мс (за это время конденсатор заряжается до уровня 1.8В), а задержка при выключении (Toff) составляет около 24 мс (за это время напряжение на конденсаторе при его разряде уменьшается до 0.6В). Во время нормальной работы микросхемы, на этом контакте должно присутствовать напряжение около +5В.
Частотозадающий резистор внутреннего генератора. При работе, на контакте присутствует напряжение, величиной около 1.25В.
Частотозадающий конденсатор внутреннего генератора. Во время работы на контакте должно наблюдаться пилообразное напряжение.
Контакт управления задержкой формирования сигнала PG (Power Good). К этому выводу подключается времязадающий конденсатор. Конденсатор емкостью 2.2 мкФ обеспечивает временную задержку 250 мс. Опорными напряжениями для этого времязадающего конденсатора являются 1.8В (при заряде) и 0.6В (при разряде). Т.е. при включении блока питания, сигнал PG устанавливается в высокий уровень в момент, когда на этом времязадающем конденсаторе напряжение достигает величины 1.8В. А при выключении блока питания, сигнал PG устанавливается в низкий уровень в момент, когда конденсатор разрядится до уровня 0.6В. Типовое напряжение на этом выводе равно +5В.
Сигнал Power Good - питание в норме. Высокий уровень сигнала означает, что все выходные напряжения блока питания соответствуют номинальным значениям, и блок питания работает в штатном режиме. Низкий уровень сигнала означает неисправность блока питания. Состояние этого сигнала при нормальной работе блока питания - это +5В.
Высокопрецизионное опорное напряжение с допустимым отклонением не более ±2%. Типовое значение этого опорного напряжения составляет 3.5 В.
Сигнал защиты от превышения напряжения в канале +3.3 В. На вход подается напряжение напрямую с канала +3.3V.
Сигнал защиты от превышения напряжения в канале +5 В. На вход подается напряжение напрямую с канала +5V.
Сигнал защиты от превышения напряжения в канале +12 В. На вход подается напряжение с канала +12V через резистивный делитель. В результате использования делителя, на этом контакте устанавливается напряжение примерно 4.2В (при условии, что в канале 12V напряжение равно +12.5 В)
Коллектор второго выходного транзистора. После запуска микросхемы, на этом контакте формируются импульсы, которые следуют в противофазе импульсам на контакте С1.
Коллектор первого выходного транзистора. После запуска микросхемы, на этом контакте формируются импульсы, которые следуют в противофазе импульсам на контакте С2.

Рис. 2. Функциональная блок-схема ШИМ-контроллера FSP3528
Особенностями этой микросхемы являются:
- наличие встроенной защиты от превышения напряжений в каналах +3.3V/+5V/+12V;
- наличие встроенной защиты от перегрузки (короткого замыкания) в каналах +3.3V/+5V/+12V;
- наличие многоцелевого входа для организации любой защиты;
- поддержка функции включения блока питания по входному сигналу PSON;
- наличие встроенной схемы с гистерезисом для формирования сигнала PowerGood (питание в норме);
- наличие встроенного прецизионного источника опорных напряжений с допустимым отклонением 2%.
Помогите с ремонтом блока питания на FSP 3528 . Дежурка на DM 311, работает. Проверил ключевые транзисторы mge 13009 и транзистоы раскачки 945 , живые. Диодные сборки выпаивал и также проверял.
На вид нет вздутых электролитов. На 3528 на 1-й ноге +5 В ; 12- 3,5 В : 3- 1, 25 В Кто подскажет в каком направлении дальше идти, велика ли вероятность неисправности шимки?
кулер починил-вентилятор чуть дергаеться при запуске.
Сопротивление 3528 при прозвонке на землю ножек:
13-10 ом
14- 15 ом
15 -0.6 ком
По выходу : 12В-95 ом; 5 В- 15 ом; 3, 3 ом-10 ом.
На 1-ой ножке +5В , на 12-3,5 В
КЗ по выходам я проверял , подав напряжение с другого блока питания на входы вторичных цепей. При этом ток был не больше 300мА.
Хотел спросить-а на средней точке транса раскачки сколько должно быть вольт. У меня около 2 В . Эти же напряжения через обмотки транса раскачки идут на коллекторы транзисторов раскачки. Не маловато ли?
Транс раскачки - по сути трансформатор тока и он же датчик тока инвертора.
Амплитуда импульсов на средней точке транса раскачки пропорциональна значению тока инвертора ( тока в первичной обмотке силового транса ).
На коллекторах транзисторов раскачки амплитуда импульсов ровно в два раза больше чем на средней точке.
При нагрузке около 150 ватт в БП 300GTF на средней точке импульсы около 25 вольт, на коллекторах С945 около 50 вольт.

Что бы кулер дёрнулся на него должно поступить напряжение .
Попробуйте ответить на такой вопрос : А откуда оно (напряжение) там возьмётся если 3528 неисправна ?
Сначала 3528 запускается , отрабатывает несколько циклов, за это время появляются выходные

Продолжая серию статей о самодельных лабораторных блоках питания, нельзя пройти мимо компьютерных блоков в основе которых лежит ШИМ контроллер серии UC38хх. В большинстве современных фирменных блоков ПК используется именно эта микросхема, что в перспективе позволяет своими руками создавать надежные и мощные источники питания. Сегодня у нас переделка компьютерного блока питания в лабораторный на ШИМ UC3843, подопытным блоком станет INWIN POWER MAN IP-S350Q2-0.
Переделка компьютерного блока питания в лабораторный на ШИМ UC3843
Основные элементы блока питания INWIN POWER MAN IP-S350Q2-0:

Ниже представлена принципиальная схема блока питания INWIN POWER MAN IP-S350Q2-0, с которой нам предстоит работать.

Переделка такого компьютерного блока питания в лабораторный будет происходить в несколько этапов:
- Отключение супервизора WT7525 N140.
- Небольшие изменения в дежурке для питания вентилятора.
- Удаление лишних компонентов.
- Изготовление нового модуля управления блоком.
- Установка новых компонентов на плату и подключение модуля.
- Тесты.
Отключение супервизора WT7525 N140
Супервизор WT7525 N140 производит мониторинг напряжения на шинах блока, отслеживает перегрузку, отвечает за пуск и аварийную остановку. Для его отключения необходимо произвести два простых действия.

- Удаляем супервизор с платы и ставим перемычку от второго к третьему посадочному выводу микросхемы.
- Удаляем конденсатор дежурки С32. Если этого не сделать, будут наблюдаться проблемы со стартом блока. Если все прошло успешно — блок будет запускаться автоматически при включении в сеть. Стоит также отметить, если С32 неисправен, блок будет стартовать с ним, но, его присутствие дает помехи, добиться нормальной работы блока невозможно.
Модификация дежурки для питания вентилятора 12 В
Выходное напряжение в блоке будет меняться в широком диапазоне, а питание 12 В штатного вентилятора должно быть неизменным. В INWIN POWER MAN IP-S350Q2-0, да и в большинстве блоков на ШИМ UC38хх присутствует лишь одна ветка дежурки 5 В. Существует несколько вариантов решения данной проблемы:
- Внесение изменений в схему дежурки.
- Установка дополнительного ac-dc преобразователя 220-12 В.
- Установка дополнительного dc-dc повышающего преобразователя 5-12 В.
Последние два варианта не нуждаются в описании из-за своей простоты включения. Мы же рассмотрим более интересный вариант.

Добавляя диод 1N4007 мы создаем отрицательную ветку дежурки, амплитуда импульсов проходящих через новый диод составит около 12 В, но при подключении вентилятора проседает до 10 В. При 10 В вентилятор способен работать, но поток воздуха немного слабоват, при желании можно оставить и так.
Чтобы добиться оптимальной работы вентилятора, необходимо немного поднять напряжение дежурки. Для этого удаляем R46 и изменяем (уменьшаем) R73 с 2 кОм до 1,5 кОм. Таким образом, напряжение на выходе дежурки будет 6 В (выше 8 В поднять не получится), а напряжения для питания вентилятора будет находится в пределах 12-13 В.
Удаление лишних компонентов
Для дальнейшей переделки нам необходимо избавиться от ненужных шин, обвязки супервизора и др. компонентов, которые не будут задействованы в блоке.

После удаления деталей, нужно изменить:
- Нагрузочный резистор R8. Ставим новый на 390 Ом мощностью 5 Вт. Он легко встанет на место выходного электролита по шине 12 В.
- Выходной конденсатор С7, устанавливаем емкостью 2200 мкФ х 35 В.
- Перематываем дроссель групповой стабилизации, оставляем лишь одну обмотку. Для расчета параметров дросселя можно использовать программу DrosselRing (детально ознакомиться с ней можно тут). Эта программка насчитала нам 20 витков провода с сечением 1 мм на родном дросселе.
Как раз на данном этапе в самый раз задуматься о стойках для размещения платы нового модуля управления блоком.

Модуль управления блоком на ШИМ UC3843
Переделка компьютерного блока питания в лабораторный на ШИМ UC3843 невозможна без изготовления небольшой платы, которая будет контролировать работу UC3843.
За основу взята микросхема LM358, в своем корпусе она имеет два независимых операционных усилителя. Один будет отвечать за стабилизацию напряжения, второй за стабилизацию тока. В качестве датчика тока используется шунт R0 из константана, сопротивлением 0,01 Ом. Обратная связь с ШИМ выполнена через штатную оптопару PC817, которая переместилась на модуль. Источником опорного напряжения служит TL431.
На новой плате присутствуют два светодиода, которые будут сигнализировать о режиме работы блока. Свечение led1 будет свидетельствовать о том, что блок работает в режиме стабилизации напряжения, led2 загорится при переходе в режим ограничения тока. Сам модуль управления не содержит дефицитных компонентов и не требует дополнительной наладки после изготовления. Расчеты обвязки LM358 произведены для выходных параметров 0-25 В и 0-10А.
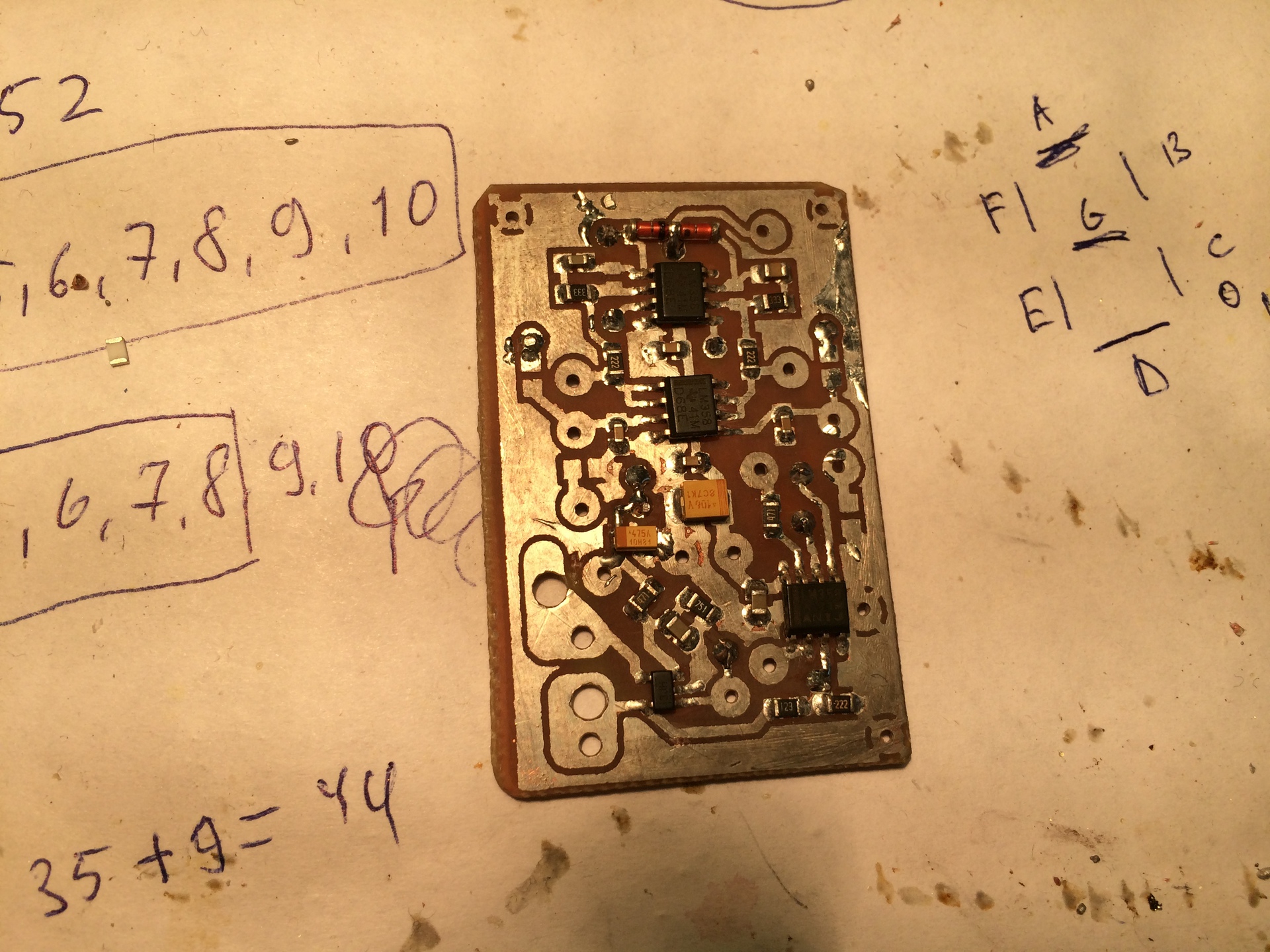
Вот так выглядит плата модуля для нашего самодельного лабораторного блока питания.

Печатку для ее изготовления в формате lay можно будет скачать в конце статьи.

Также желательно оставить небольшой запас текстолита для крепления модуля к стойкам. На схеме и плате для удобства расставлены буквенные обозначения точек подключения.
Подключение модуля к блоку
Используя нижеприведенную схему, подключаем все точки модуля управления к основной плате блока.

Назначения точек подключения:

Настройка блока и тесты
После подключения платы можно проводить первое пробное включение в сеть. Достаточно проверить работоспособность регулировки напряжения и тока. Нагружать блок на этом этапе по полной не стоит, достаточно убедиться в стабильности его работы.

В работе блока могут присутствовать небольшие писки, похожие на тонкий свист. Для их устранения необходимо внести небольшие корректировки в обвязку ШИМ:
- Увеличение емкости конденсатора С26 с 2,2 нФ до 220 нФ.
- Корректировка резистора R15. R15 желательно подбирать экспериментальным путем на максимальном токе. С уменьшением R15 писк будет постепенно стихать, но, в один момент UC3843 сама начнет ограничивать ток, проходящий через ключ Q8. Экспериментально значение R15 удалось получить в районе 2,2 кОм, при этом UC3843 еще не ограничивает ток, а писка практически не слышно.

Все манипуляции с обвязкой ШИМ необходимо проводить максимально осторожно. Некоторые элементы находятся под опасным для жизни напряжением. У нас не получилось с первого раза побороть все посторонние звуки в блоке, некоторые эксперименты закончились частичным, а потом и полным выходом из строя блока, пришлось найти второй такой-же и продолжить переделку.
И так, финишные тесты после всех корректировок. В процессе сборки произошла небольшая заминка с цветом светодиодов, красный сигнализирует о работе в режиме стабилизации напряжения, а зеленый — режим ограничения тока. В дальнейшем исправим, сделаем все как у людей:
После всех манипуляций переделка компьютерного блока питания в лабораторный на ШИМ UC3843 окончена! Последним этапом станет оформления корпуса и установка резисторов точной настройки тока и напряжения (подключаем последовательно с основным регулятором, номинал 10% т.е. 1 кОм). Также, корпус блока желательно отключить от общего минуса, чтобы избежать случайного КЗ в обход датчика тока (для этого достаточно убрать перемычку).

Приносим благодарность Виталию Ликину за изготовление прототипов наших идей и предоставленные фотоматериалы. Мы еще добавим финишный вариант оформления блока и его краш-тесты. Как и обещали, ссылка платы модуля управления в формате lay.
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
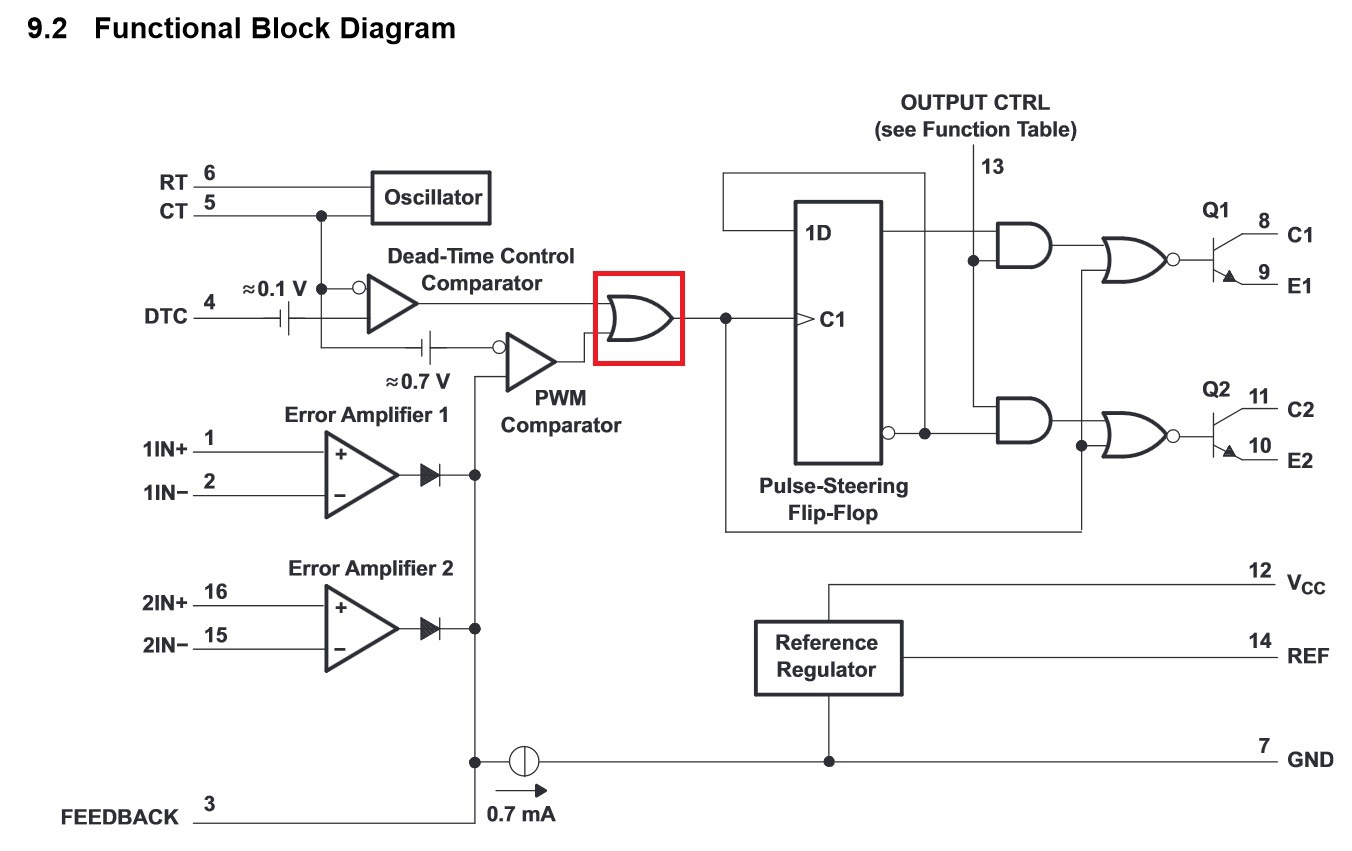
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
От теории к практике
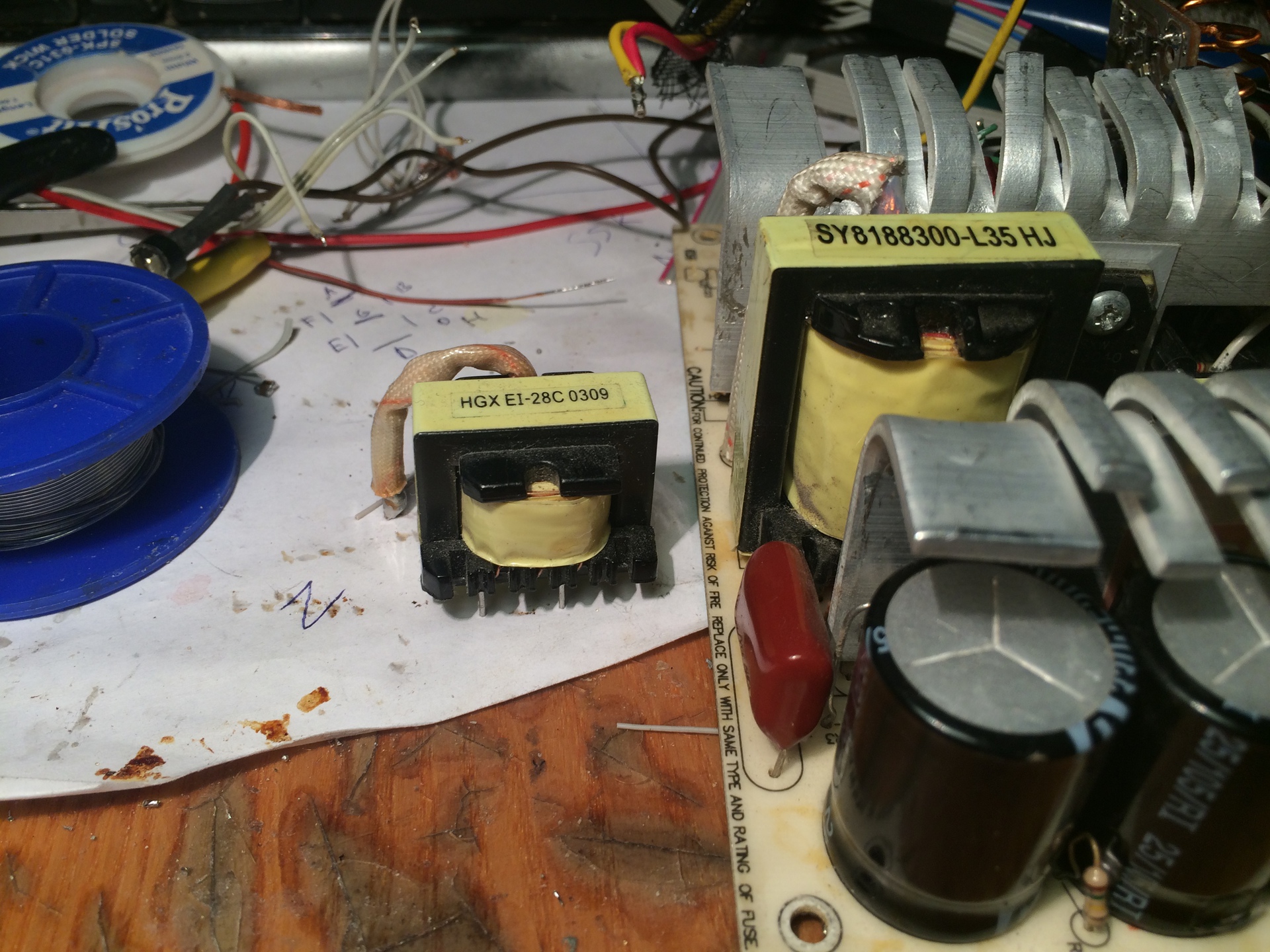
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
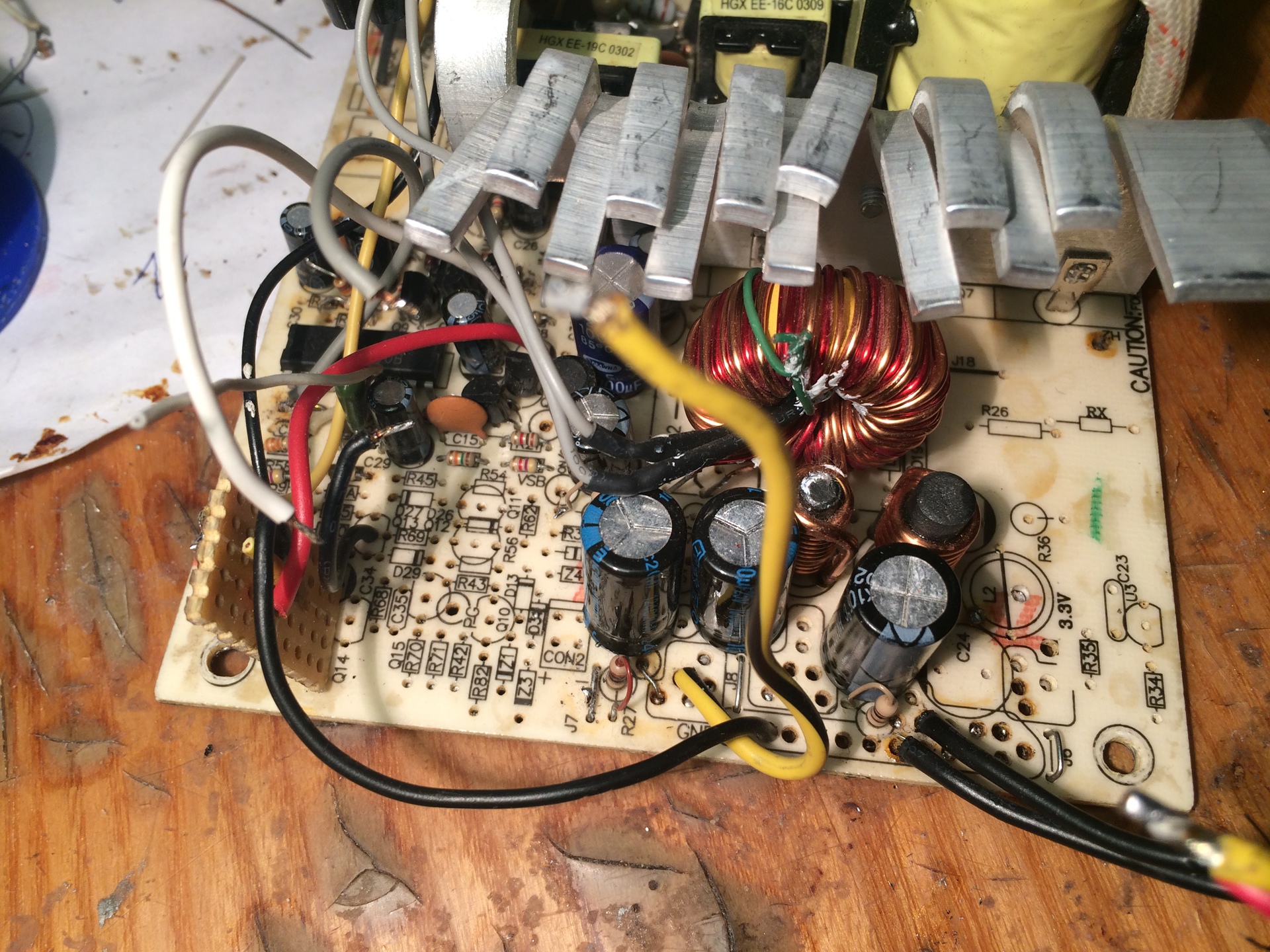
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.

Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
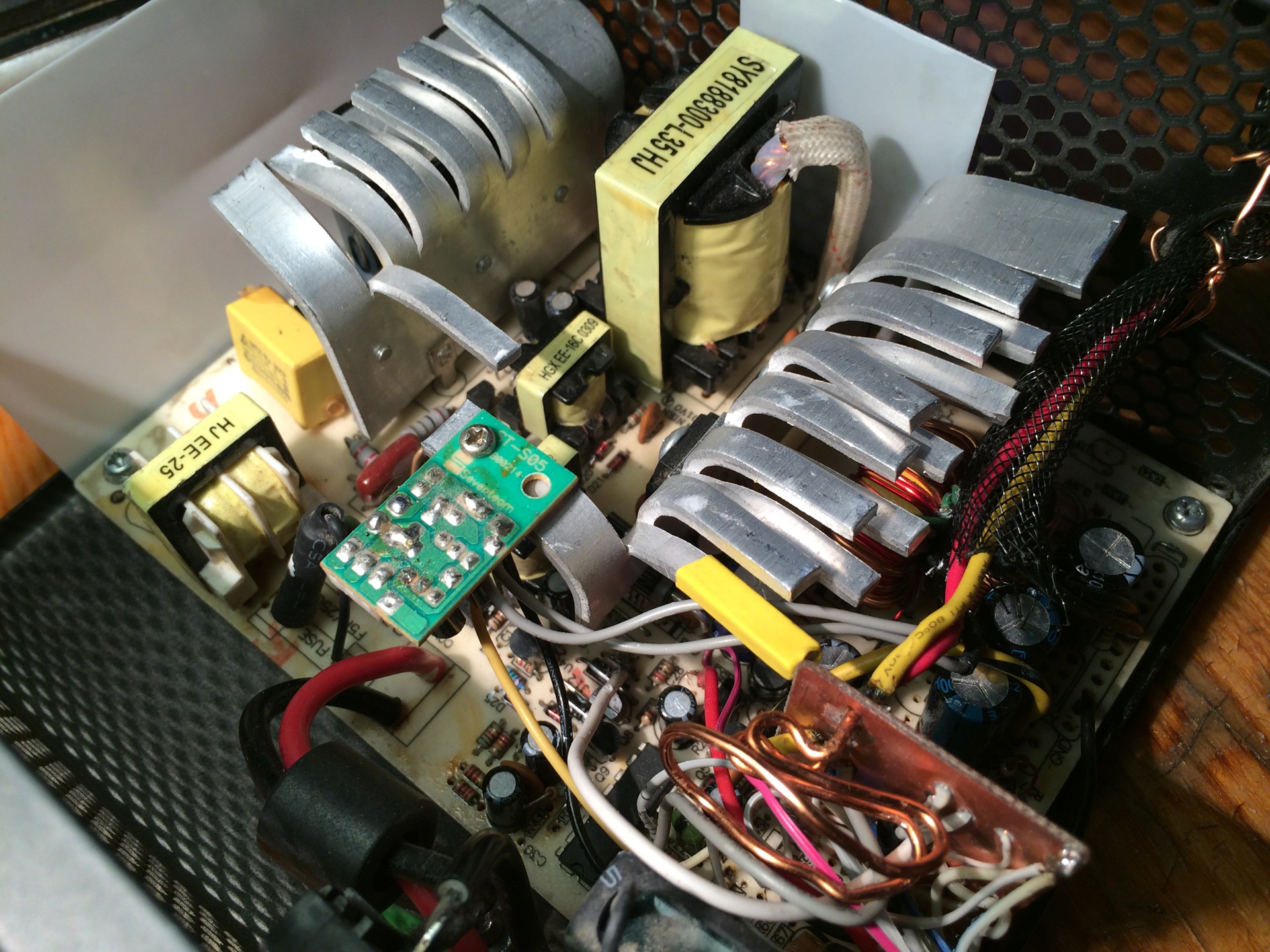
По этой схеме лазерным утюгом была изготовлена плата:
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
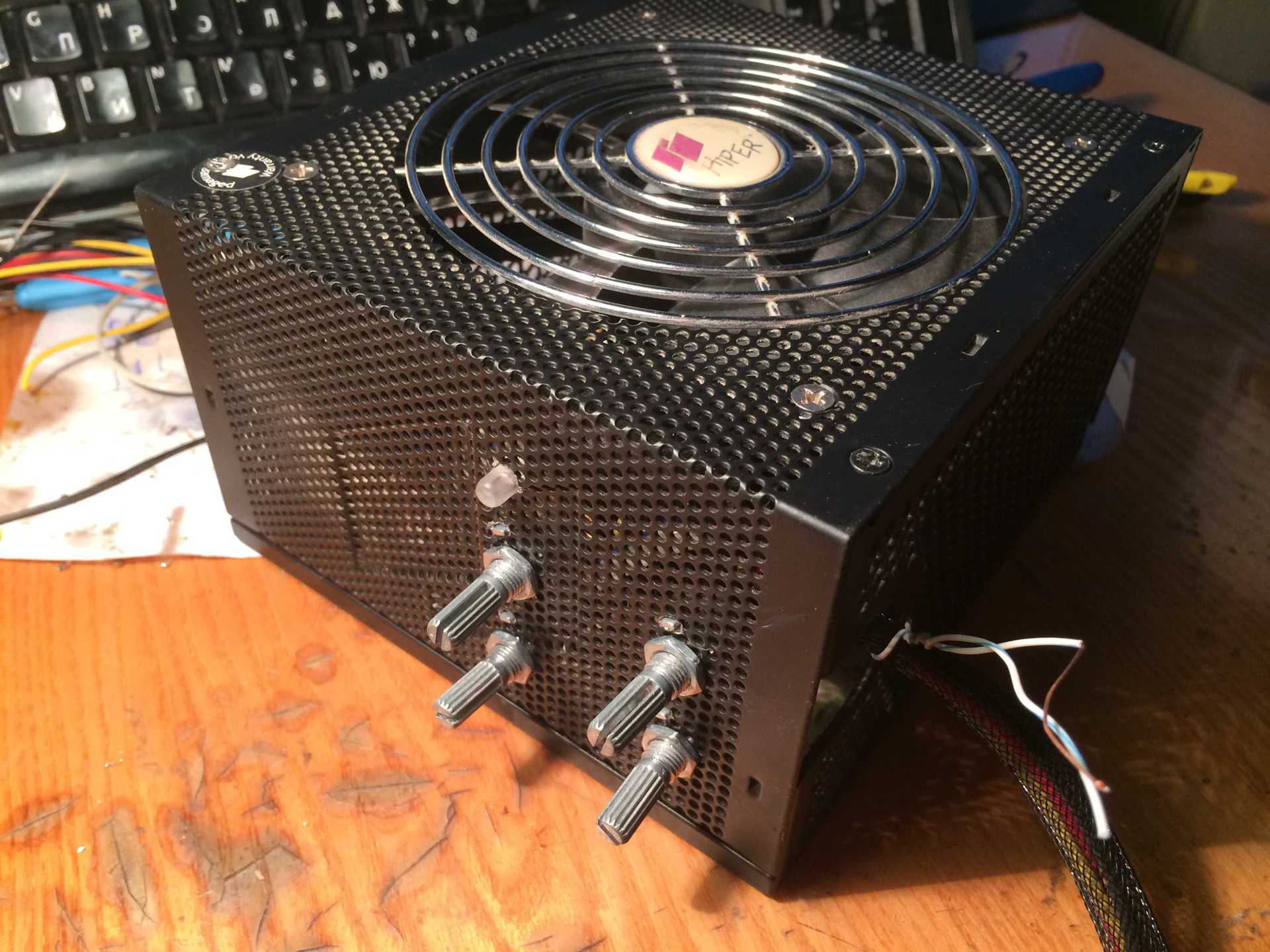
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper'a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру

Читайте также: