Птерадаптель своими руками
Добавил пользователь Алексей Ф. Обновлено: 10.09.2024
Затрагивая таинственную тему динозавров, невозможно не вспомнить птеродактиля – огромного летающего динозавра с большими крыльями и острым клювом. Эти летающие ящеры давно вымерли вместе с остальными представителями древней фауны, упоминания о них можно встретить в летописях юрского периода. Те изображения птеродактилей, которые предоставили нам ученые, сильно напоминают современных пеликанов. Но известно также, что эти динозавры могли достигать огромных размеров, и у них были мелкие острые зубы.
Предлагаем вам простой в исполнении урок лепки динозавра птеродактиля, который обязательно понравится вашему ребенку. Возможно, после такого увлекательного творчества и рассказов родителей о неведомых существах, детям будет интересна древняя история, биология и другие смежные предметы.
Поэтапный фото урок:
Скатайте серый шарик для лепки головы птеродактиля (можно заменить серый цвет любым другим, но неярким).

Слегка вытяните носовую часть и налепите на нее длинный острый клюв желтого цвета, добавьте глаза.

Дополните облик птеродактиля мелкими деталями: зрачками, насупленными бровями, чтобы получился более злой внешний вид, хохолком, задранным вверх, и перепонкой под клювом, чтобы показать сходство с пеликаном.

Из большего, чем предыдущее, количества серого пластилина сделайте овальное туловище.

Прикрепите с одной стороны длинную тонкую шею.

Соедините конец шеи и голову.

Выберите пластилин для лепки крыльев, например, коричневый. Разомните кусочек в руках, затем поделите на две порции и превратите каждую из них в треугольную лепешку.

Прикрепите крылья к спине, надавив на пластилин.

Подготовьте место для крепления лап, разрезав заднюю часть туловища стекой.

Разгладьте пластилин в том месте, где будут расположены лапы.

Прикрепите задние конечности, слепив их из оранжевого пластилина. Их можно загнуть вперед или оставить, торчащими назад, показывая, что огромный птеродактиль застыл в полете.

Получился динозавр птеродактиль, который охотится в полете. Поскольку семейств динозавров было много, то, надеемся, слепленный представитель будет похож на кого-либо из них.

Эта инструкция — история о том, как я сделал прототип орнитоптера.
Для тех, кто не знает, орнитоптер — это механизм, который летает за счёт взмахов крыльями, как настоящая птица. Идея состояла в том, чтобы создать орнитоптер с нуля, управлять им дистанционно и, конечно, заставить его летать.
Пожалуйста, не судите строго — я не профессионал авиамоделирования. Так что не всё работает так, как мне бы хотелось, но всё же работает.
Реальный результат можно увидеть в многосерийном видео на нашем канале Youtube. Если вам понравится это руководство, пожалуйста, подпишитесь на канал.
Инструкция со временем будет исправляться и улучшаться новыми материалами, как и Орнитоптер.
Видеообзор
1. Выбор начальных параметров размаха крыльев, веса и частоты взмахов.
С какой частотой птицы обычно машут крыльями?
Это зависит от площади крыла самой птицы. Например, для аиста достаточно махать крыльями с частотой 2 взмаха в секунду, воробей должен делать 13 взмахов в секунду, а колибри - до 80. Я хотел сделать большой орнитоптер, поэтому площадь крыла тоже будет большой. Для расчета площади крыла нужно знать размах крыльев. Итак, размах крыльев стал первым выбранным параметром. Я решил сделать орнитоптер с размахом крыльев в диапазоне 1200-1400 мм.
Я искал в интернете существующие конструкции орнитоптеров и анализировал их размеры. Большинство орнитоптеров сделаны в строке определенного размера. Орнитоптеры Hobbie могут быть отсортированы по размаху крыльев (от 660 до 3000 мм) и весу в полете. Мой орнитоптер с размахом крыльев 1200-1400 мм будет где-то посередине этой шкалы, не большой, но и не маленький.
Я искал информацию о конструкции на форумах авиамоделирования, в спецификациях об орнитоптерах и во множестве видео на Youtube. Я выяснил, что орнитоптеры с таким размахом крыльев должны выполнять от 5 до 7 взмахов в секунду и иметь полетный вес в диапазоне от 300 до 500 г. Я выбрал среднее значение веса полета - 400 г. Поскольку у меня нет опыта в создании самолетов и махалетов, я выбрал все значения эмпирически и в основном надеялся на удачу.
Зная приблизительную частоту взмахов (от 5 до 7 Гц), я могу разработать механизм взмахов.
В итоге для орнитоптера мною были выбранны следующие параметры:
2. Выбор Махательного Механизма
Махательный Механизм является наиболее важной частью орнитоптера. Он преобразует электроэнергию от батареи в махательное движение крыльев. Разработать и собрать такой механизм достаточно сложная задача,так как он должен выдерживать огромные усилия, которые меняют направление несколько раз в секунду, и в то же время быть чрезвычайно легким и долговечным.
Существует большое количество махательных механизмов. Вот самые используемые.

Кривошип (Staggered Crank)
Конструкция кривошипа является самой базовой среди махательных механизмов. Части ступенчатого вала находятся на необходимиом растоянии и под необходимым углом для достижения симметричного взмаха. Это часто используемая конструкция среди любителей, которые собирают орнитоптеров из подручных материалаов.

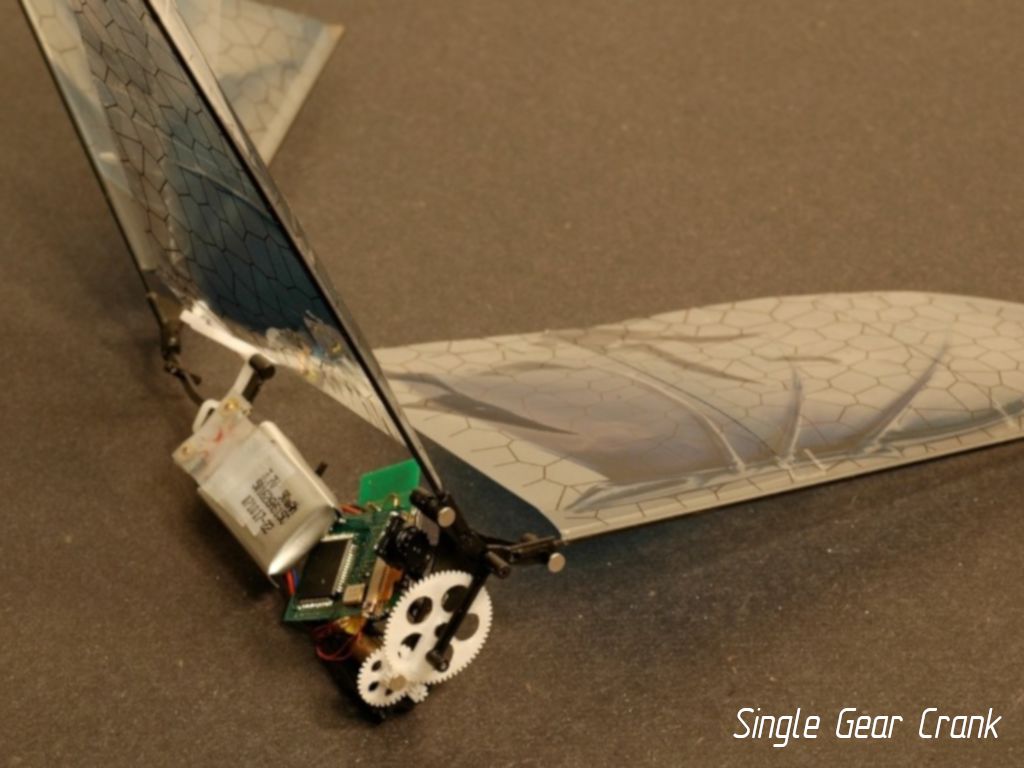
Кривошип с одной передачей (Single Gear Crank)
Несмотря на то что конструкция кривошипа с одной передачей выглядит простой, она сложнее, чем кажется. Центральная точка, где соединительный стержень и шарниры крыльев соединены друг с другом, должна расширяться и сжиматься при закрывании механизма. Сжатие и расширение с очень высокой частотой может привести к износу компонента.
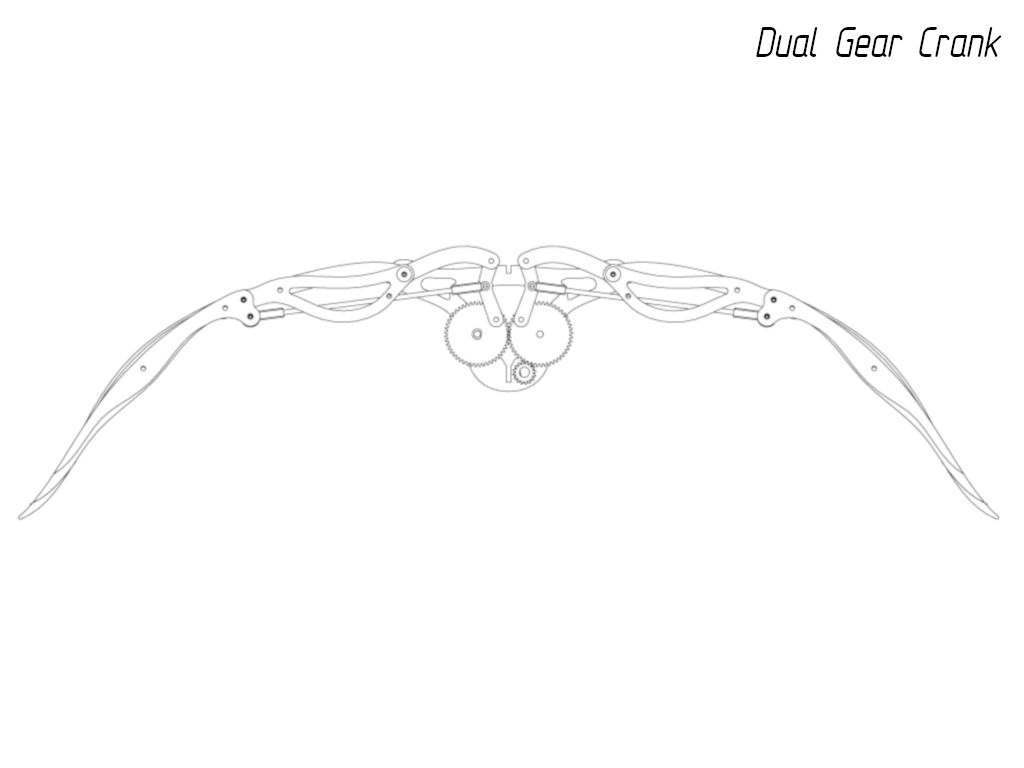
Кривошип с дмумя передачами (Dual Gear Crank)
Эта конструкция имеет две шестерни, которые управляют петлями каждого крыла по отдельности. Существует несколько вариантов конструкции трансмиссии. Шестерня может приводить в движение обе вспомогательные передачи. Таким образом, вторичные шестерни будут вращаться в одном направлении друг с другом. В другой конструкции ведущая шестерня вращает вторичную шестерню, а эта вторичная шестерня вращает другую вторичную шестерню. Вторичные передачи будут вращаться против часовой стрелки друг к другу. Эта конструкция намного проще в реализации и уменьшает несоосность крыла.


Поперечный вал (Transverse Shaft)
Поперечная конструкция вала является еще одним вариантом кривошипно-шатунного механизма. Эта конструкция обеспечивает максимально симметричный взмах. Однако это самый тяжелый и сложный дизайн. Вращающиеся зубчатые колеса и крылья находятся не в одной плоскости, поэтому соединительный стержень должен вращаться. Стержень соединителя имеет шариковый подшипник внутри, и это добавляет вес только к самому компоненту. Количество зубчатых колес, используемых в этой конструкции, больше, чем в любой другой конструкции. Конструкция поперечного вала обычно используется для больших орнитоптеров, где вес можно преодолеть с помощью больших крыльев.

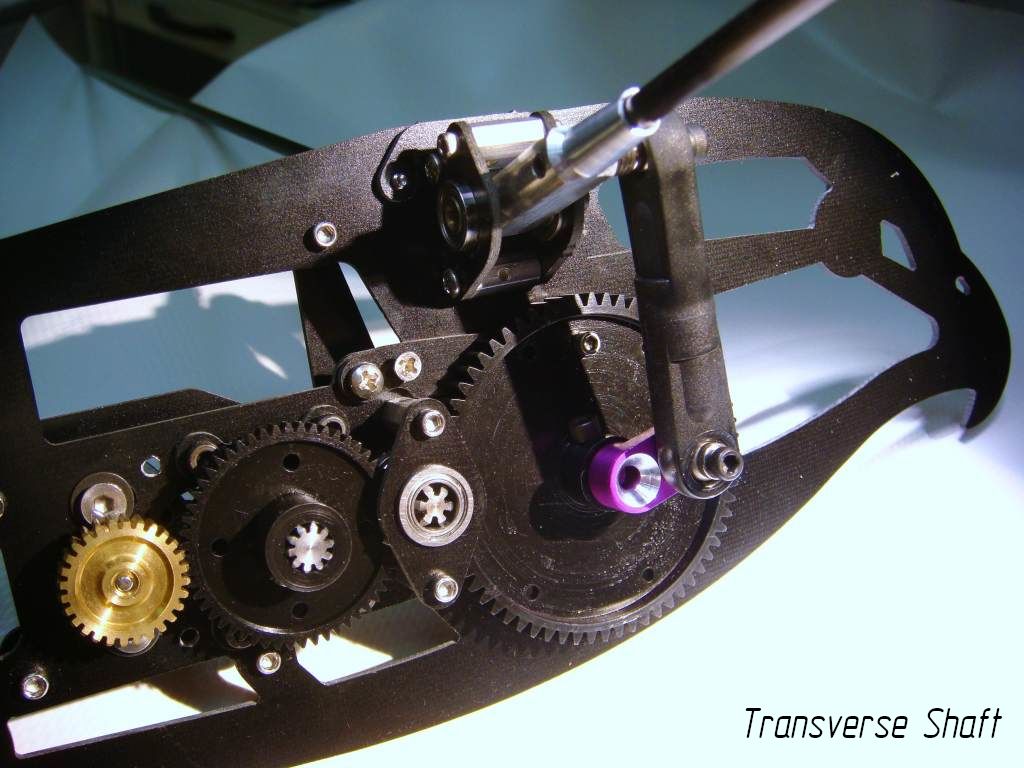
Я решил выбрать конструкцию с поперечным валом. Размер моего орнитоптера позволяет использовать дополнительную массу механизма. Кроме того, такую конструкцию легко изготовить из листового материала, так как плоскости зубчатых колес параллельны плоскости корпуса.
3. Выбор компонентов. Мотор, ESC и Aккумулятор.
Выбор мотора
Мотор должен быть небольшого размера. Моторы большого размера имеют большой вес, что очень критично для конструкции. В то же время электродвигатель должен быть прочным, чтобы обеспечить достаточный крутящий момент для преодоления сопротивления воздуха.
Для увеличения крутящего момента и достижения необходимой частоты взмахов я собираюсь использовать редуктор. В этом случае я могу взять более слабый двигатель с более высоким числом оборотов в минуту (об / мин).
Принимая во внимание размеры орнитоптера, хобби электромоторы размером 300 - 400 должны идеально подходить. Хобби-моторы такого размера могут быть коллекторными или бесколлекторными. В основном вы можете найти их в средних RC катерах и вертолетах.
Я выбрал этот мотор:
Его можно заменить на:

Обратите внимание на важную деталь. Вам нужен аутраннер. Монтажные отверстия двигателя должны быть на одной стороне с выходным валом. Таким образом, корпус, который находится рядом с выходным валом, должен быть неподвижным.
Основные характеристики двигателя:
Краткое объяснение названия:
Источник питания
В моем орнитоптере батарея - это один из самых тяжелых компонентов, поэтому очень важно выбрать правильную.
Для питания двигателя я использую Li-Po аккумулятор. Коэффициент отношения емкости к массе у таких аккумуляторов достаточно высок. Кроме того, они способны выдавать высокое значение тока, которое требуется для бесколлекторных двигателей.
Существует заметная разница в весе между 2-х и 3-х ячеечными батареями одинаковой емкости. Поэтому я думаю, что лучше использовать 2-ячеечную батарею.

Основные характеристики батареи:
Довайте проверим, достаточно ли максимального тока батареи.
Умножив скорость разряда на емкость, можно рассчитать максимальное значение тока, которое может выдавать аккумулятор:
30C * 0,9Ah = 27 Amp.
Максимальный ток 27 А превышает значение, которое может потреблять двигатель (22 А), поэтому все в порядке. Так же очень важана емкость аккумулятора. Этот параметр влияет на продолжительность полета орнитоптера.
Однако, в моем случае, гораздо важнее выбирать батарею в зависимости от веса.
Регулятор оборотов (ESC)
Для управления и регулирования скорости бесколлекторного мотора нужен контроллер. Любой хобби ESC подходит для этого. Единственное, что нужно проверить - это длительный и пиковый ток. Чтобы уменьшить вес орнитоптера, лучше выбрать контроллер в мини-форме.
На сегодняшний день различные технические приспособления прочно вошли в нашу жизнь и стали неотъемлемой ее частью. То, что еще недавно казалось фантастическим, сегодня уже является реальностью и меняет ее. Одним из наиболее востребованных устройств являются квадрокоптеры.
Квадрокоптер или дрон используется в различных сферах начиная от доставки посылок и заканчивая военным сектором. Сегодня попытаемся разобраться, как сделать квадрокоптер своими руками в домашних условиях пошагово из подручных материалов.


Необходимые детали
Чтобы собрать мощный самодельный коптер для дальних полетов с нуля, потребуется иметь определенный комплект элементов. Это:
- рама и материалы для ее сборки;
- пропеллер;
- пульт, а также приемник для сигнала от пульта;
- двигатель;
- камера;
- контроллер;
- регуляторы оборотов;
- набор вспомогательных запчастей;
- схема самого квадрокоптера.




Рама и ее комплектующие
Чтобы наш дрон летал надежно, следует понимать, что его рама должна быть максимально крепкой и качественной. Тут еще многое будет зависеть от того, для каких целей будет он использоваться. Если требуется грузовой с подъемом 200 кг, то раму делаем максимально прочной из соответствующих материалов. Если это будет простой спортивный квадрокоптер, то можно облегчить его вес.


А если требуется сделать большой гибридный дрон, скажем, для съемки, но который можно переоборудовать под грузовой, то потребуется выбрать другие материалы для рамы.
Существует два варианта решения данного вопроса:
- выбор готовой рамы;
- собственноручно сделанное основание для квадрокоптера.
Тут тоже присутствует ряд нюансов. Если купить уже готовое решение, то чаще всего на такую раму просто остается прикрутить другие необходимые части – и можно производить запуск дрона. Но если определенная деталь получила повреждения при падении либо неаккуратном использовании, и требуется ее замена, то надо будет ждать, пока заказанная вами запчасть будет привезена, и вы ее замените.


Если говорить о сборке рамы своими руками из подручных средств, то тут потребуется осторожно вырезать необходимые элементы и прикрепить их друг к другу. Если же произойдет что-то непредвиденное, то сломанную часть можно будет просто поменять на новую.
Учитывая, что многие отдают предпочтение раме, собранной именно самостоятельно, то лучше всего для ее создания подойдут трубы, выполненные из пластика. Их обычно применяют при создании каналов для кабелей. Характеристики таких труб отлично подойдут для крепления всех нужных частей управления и моторов.
Для закрепления моторов можно применить крепления, применяющиеся для закрепления труб на стенах при прокладывании кабелей.
Они являются настолько хорошим решением для квадрокоптера, что можно не бояться прикреплять на них не только детали дрона, но и камеру.
Мотор
Есть 2 категории двигателей, что применяются в данном случае:


Обычно применяется второй тип моторов, что позволяет быстро реагировать на изменения в оборотах и крутящем моменте. Чтобы использовать такой мотор, потребуется оснастить его специальным электрорегулятором скорости. Какой-либо другой вид двигателя, скажем, бензиновый, здесь использовать нельзя.
Размер этих устройств обычно обозначается неким 4-значным числом, где первые 2 цифры будут означать статорную ширину, а оставшиеся – высоту или его диаметр. То есть, например, имеется статор модели Racestar BR2205 – значит, он будет иметь размер 22 миллиметра и 5-миллиметровую высоту. Добавим, что чем выше статор, тем более высоких оборотов будет его мощность. А чем больше его ширина, тем больше будет крутящий момент при более низких оборотах.
Важным при выборе мотора будет значение KV, что означает скорость вращения двигателя при подаче 1 вольта на обмотку.
Определение значения будет осуществляться по количеству обмоток провода меди в моторном статоре и соответствующей силой магнитов. Данный параметр определяет, какого типа винт можно применять с тем или иным двигателем.


Пропеллер
Если говорить о пропеллерах, то они осуществляют трансформацию механической энергии моторов в тягу. Крайне важными его характеристиками будут размер и форма. Они делаются из различных материалов, среди которых можно назвать дерево, углеродное волокно и пластиковый композит. Каждый из упомянутых материалов имеет свои уникальные свойства, благодаря чему квадрокоптер получает те или иные преимущества. Но наиболее распространены винты из пластиковых композитов. Ряд пользователей иногда берут нужные элементы от кулеров.



Размер детали, которую можно установить на ту или иную модель дрона, ограничен размерами рамы и мощностью мотора. Обычно чем больше пропеллер можно применить для создания конкретной тяги, тем его эффективность будет выше. Для мини-дронов можно использовать 5- или 6-дюймовые винты с шагом до 5 дюймов.
Количество лопастей будет оказывать влияние на тягу и расходование энергии. Чем их будет больше, тем выше будут эти показатели.
Пульт и приемник
Пульт обязательно нужно приобретать вместе с приемником сигнала. Тогда вы будете уверены, что приемник будет производить прием именно сигнала, что послан с пульта.
Хорошие модели будут стоить от 1000 рублей и более, но их радиус действия будет больше, чем у более дешевых.
На пультах часто располагается масса ненужных переключателей, которые просто путают пользователя. Такие модели лучше не приобретать.

Батарея
На сегодняшний день для питания квадрокоптеров используются литий-полимерные решения. Именно они вместе с мотором и ESC образовывают механизм энергопитания дрона. Такие аккумуляторы выглядят как набор ячеек, каждая из которых имеет напряжение 3,7 вольта. Если нужно большее напряжение, то ячейки могут соединяться последовательно, чтобы создался единый аккумулятор. Присутствует ли такая возможность в том или ином типе аккумуляторов, можно понять по наличию буквы S или P в маркировке. Если присутствует S, то речь идет о последовательном соединении, а если P, то параллельно. Чем больше ячеек имеет батарея, тем больше ее емкость.


Регуляторы оборотов
Данный элемент характеризуется моторными витками, мощностью, наличием или отсутствием реверса, сопротивлением внутреннего типа, а также точностью работы. Лучше всего приобретать моторы с контроллерами. В противном случае придется искать специальные регуляторы оборотов для определенного двигателя.
Камера
Если говорить о камере, то к ее выбору следует подойти максимально ответственно. Для записи можно применять экшн-камеры по типу GoPro. А вообще, потребуется ориентироваться на ее угол обзора и массу. Особенно интересной ситуация будет с углом обзора. Хочется же, чтобы камера снимала все, но не коптерные лучи. И чтобы этого не было, придется или ее опускать, или выносить вперед.
Если ее опускать, то делать это потребуется сильно, что может стать причиной проблем с посадкой, взлетом и маневренностью из-за смещения центра тяжести.
Если камеру выносить вперед, то это также сместит его, либо придумывать крепкий фиксатор. В общем, к выбору камеры следует подходить максимально ответственно.


Китайские детали
Если собрались приобретать детали для квадрокоптера или дрона в Китае, то следует знать, что китайцы часто завышают характеристики различных деталей. По этой причине следует быть крайне осторожным в выборе различных комплектующих, чтобы их характеристики отвечали требованиям, которые заложены в проект интересующего вас квадрокоптера. В этом вопросе вы будете делать все, с большой долей вероятности, на свой страх и риск.
Контроллер
Контроллер можно использовать либо универсальный, либо специализированный вариант. Первый тип можно применять буквально с любым типом дронов, ведь он не заточен под управление чем-либо конкретным. На него можно повесить много оборудования, и он оснащен массой датчиков, а также имеет много различных функций. Но у него есть недостатки, а именно: высокая стоимость и необходимость его настройки. Для этого потребуется иметь специальное программное обеспечение, сделанное для конкретного контроллера.
Там можно произвести любые регулировки, но для этого потребуются силы, определенные знания и время.
А вот специализированная модель создана для конкретного устройства. Конечно, это дает определенное пространство для маневра, но все же точность настроек будет тут меньше, нежели в универсальном аналоге. Стоит такой контроллер немного, но и имеет он не слишком большое количество функций.
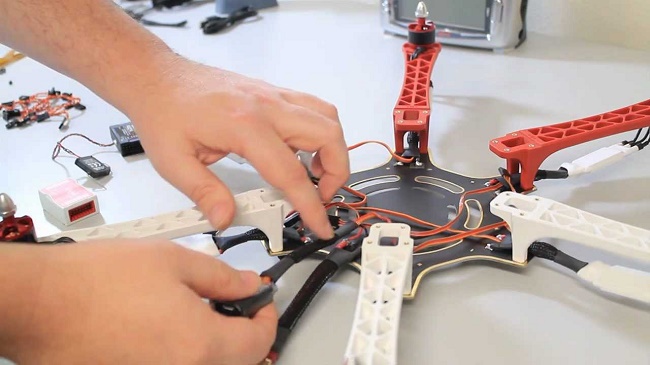
Сборка
Приведем подробную инструкцию, как осуществляется сборка.
Настройка
Теперь необходимо произвести настройку квадрокоптера, чтобы уже при первом полете он случайно не разбился или не вышел из строя.
- Для начала требуется произвести запуск моторов. Тут бывает по-разному, поэтому лучше сначала ознакомиться с документацией к двигателям.
- Нажимаем на газ и наблюдаем, куда крутятся винты. Они должны вертеться именно по схеме, что идет в комплекте с контроллером. Если они крутятся в противоположном направлении, то это будет означать инверсию управления. Если что-то идет не так, как требуется, следует перевернуть коннектор, объединяющий мотор с контроллером.
- Если все работает, как требуется, то теперь следует прикрутить верхнюю часть рамы. Тут нужно быть предельно осторожным и не пробовать втолкнуть ее туда. Если она встала очень туго, следует обратить внимание на крепления, ослабить болты снизу, после чего затянуть все осторожно.
- Производим закрепление блока с батареями, осуществляем монтаж пропеллерных адаптеров на моторы.
- Осуществляем монтаж пропеллеров, принимая во внимание вращательную сторону. Приподнятая часть лопасти должна смотреть туда, куда производится вращение.


На этом настройка дрона будет закончена, и квадрокоптер будет готов к первому полету.
Рекомендации
Если говорить о рекомендациях, которые можно дать по сборке рассматриваемого устройства собственноручно, то тут следует все рассчитать максимально точно, если вы решили собирать устройство сами. Размеры всех деталей должны быть правильными, чтобы одна часть не мешала другой и не нарушала работу всего квадрокоптера.
А также не будет лишним обзавестись максимально подробной и четкой схемой и инструкцией по сборке дрона, чтобы устройство функционировало, действительно, так, как требуется.
Кроме того, следует серьезное внимание уделить подбору комплектующих, чтобы они максимально подходили и были высокого качества для повышения долговечности дрона. Особое внимание требуется также уделить аккумуляторам, которые должны быть довольно емкими для того, чтобы устройство могло максимально длительно находиться в воздухе на одном заряде аккумуляторной батареи.
О том, как сделать квадрокоптер своими руками, смотрите далее.
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
С чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.

Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
- Двигатели для дрона нужно выбирать с запасом. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены.
- Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.
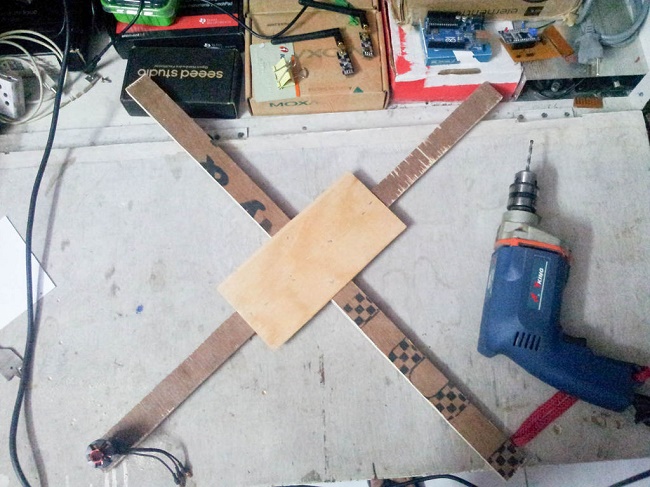


Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.
Совет! Для начинающих рекомендуется купить готовую раму для сборки. Пользователь сразу получает изделие, у которого предусмотрено место для размещения батарей, двигателей, до минимума снижена масса.
Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
- Трехлопастные пропеллеры дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
- система взаимодействия по радио или Wi-Fi каналу;
- GPS для ориентирования и движения по маршруту;
- схема позиционирования, ра