Поисковая пищалка для квадрокоптера своими руками
Добавил пользователь Дмитрий К. Обновлено: 08.09.2024
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
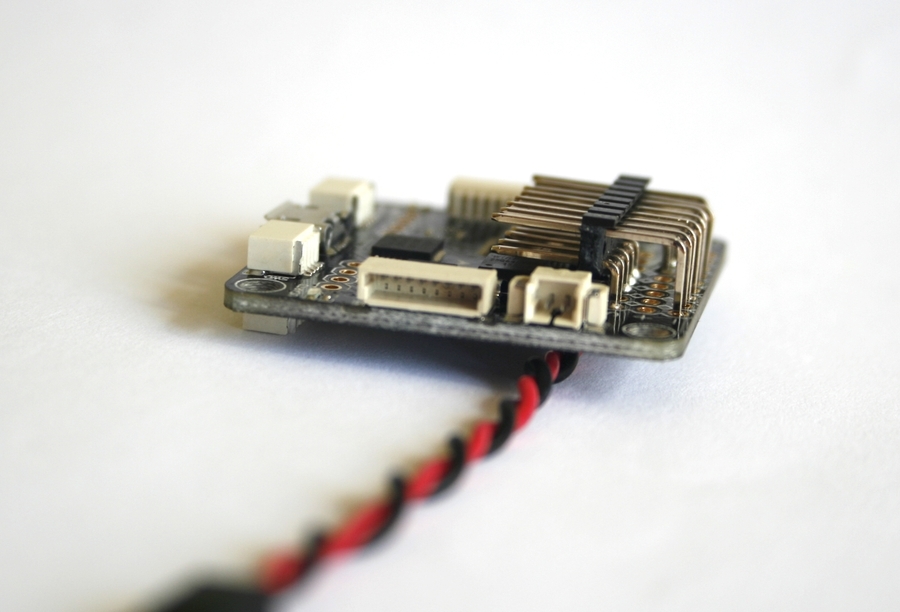
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
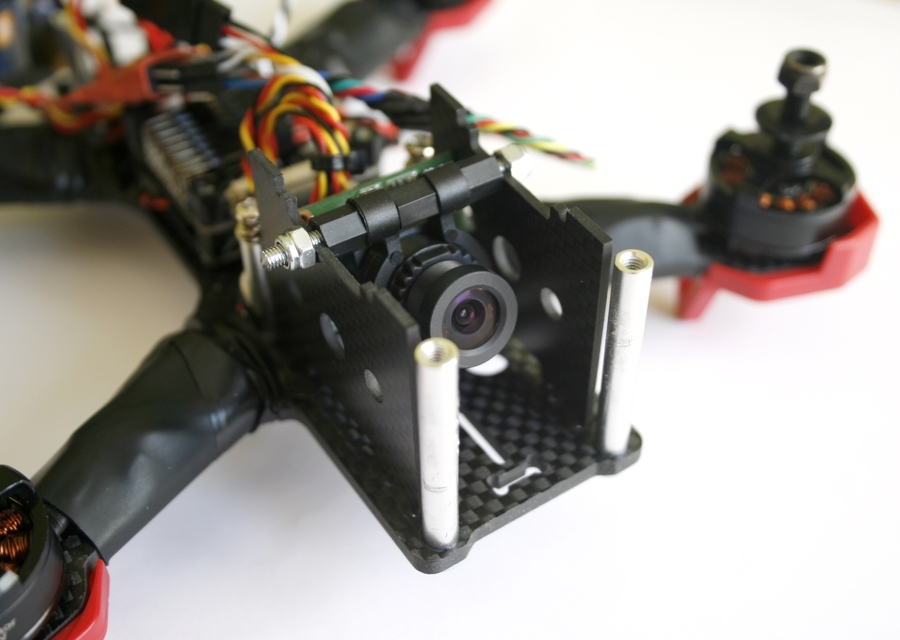
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
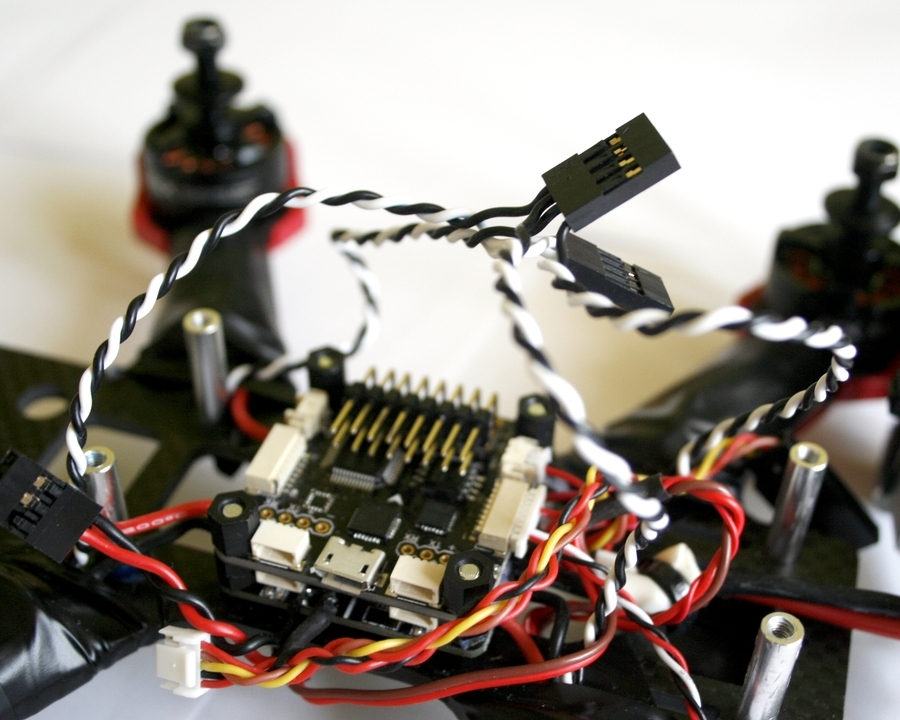
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
Комплектующие
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Выбор полётного контроллера
Схема проводки

Сборка
Для начала несколько общих советов по сборке:
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
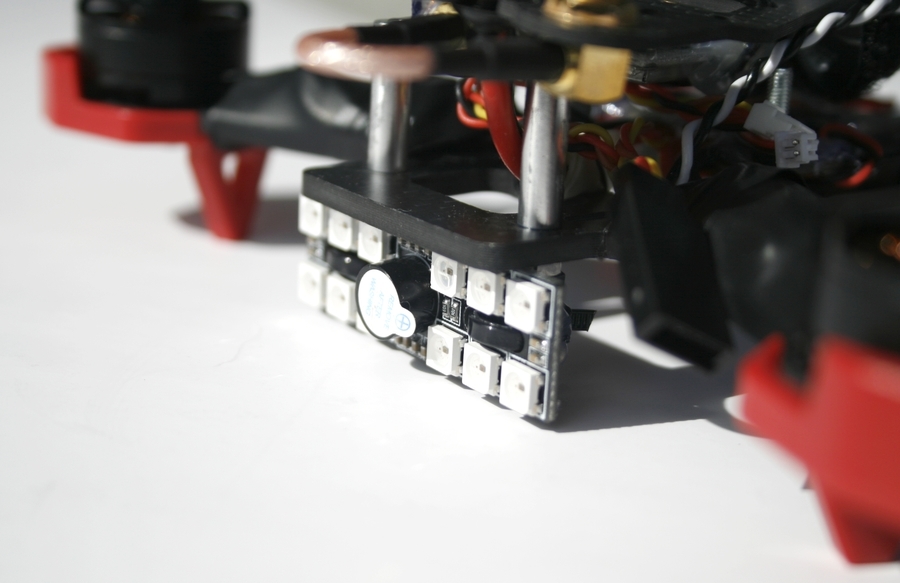
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
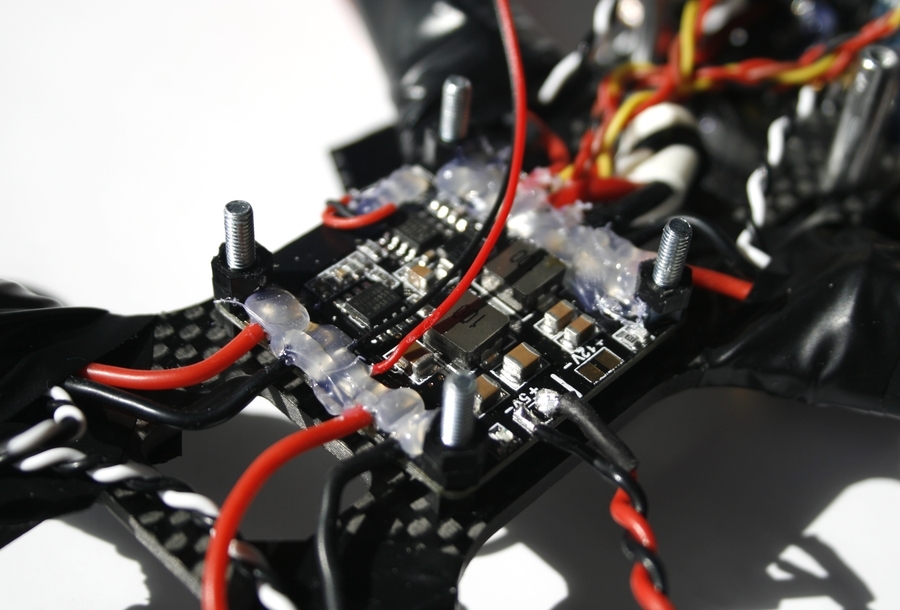
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
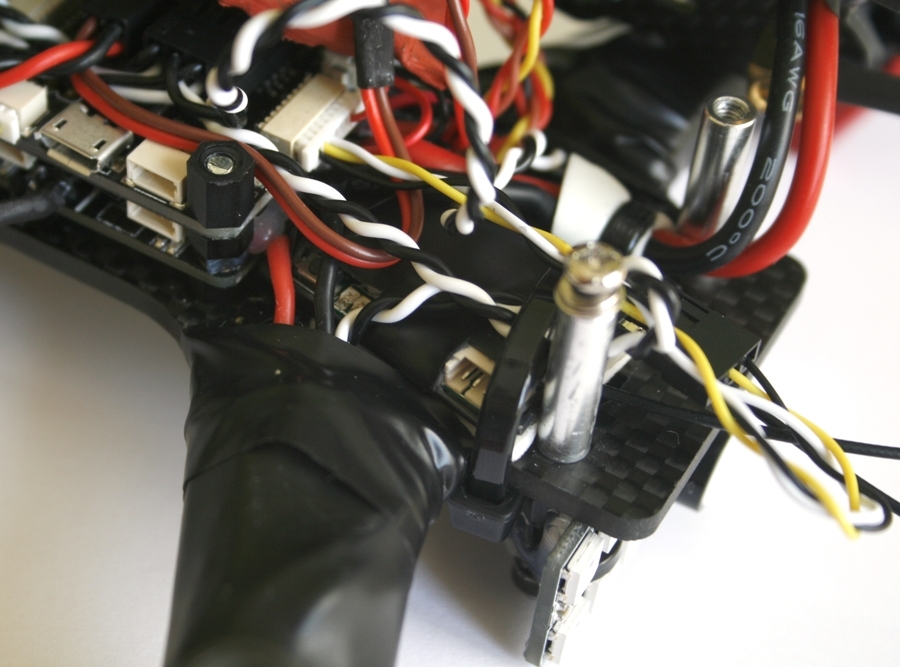
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
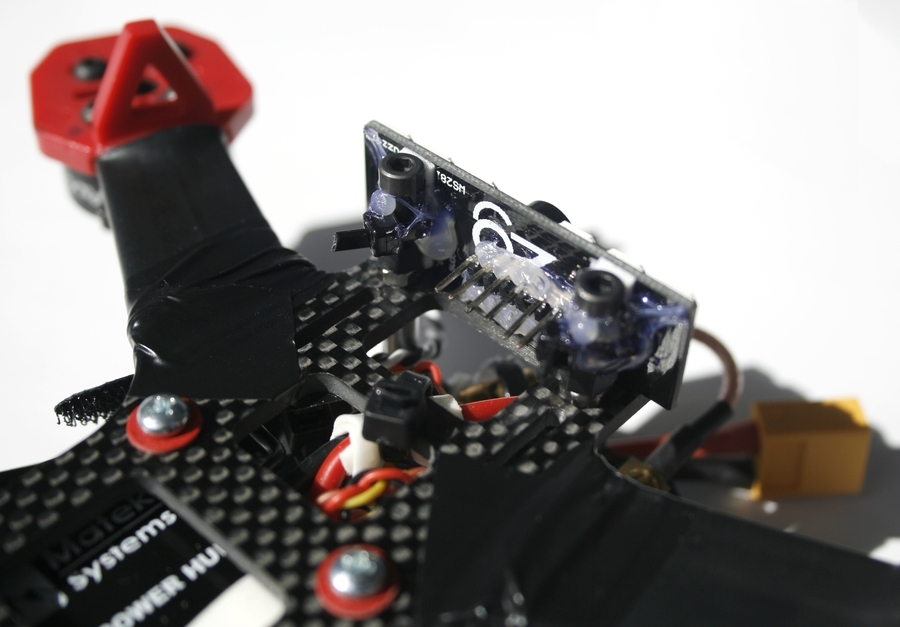
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
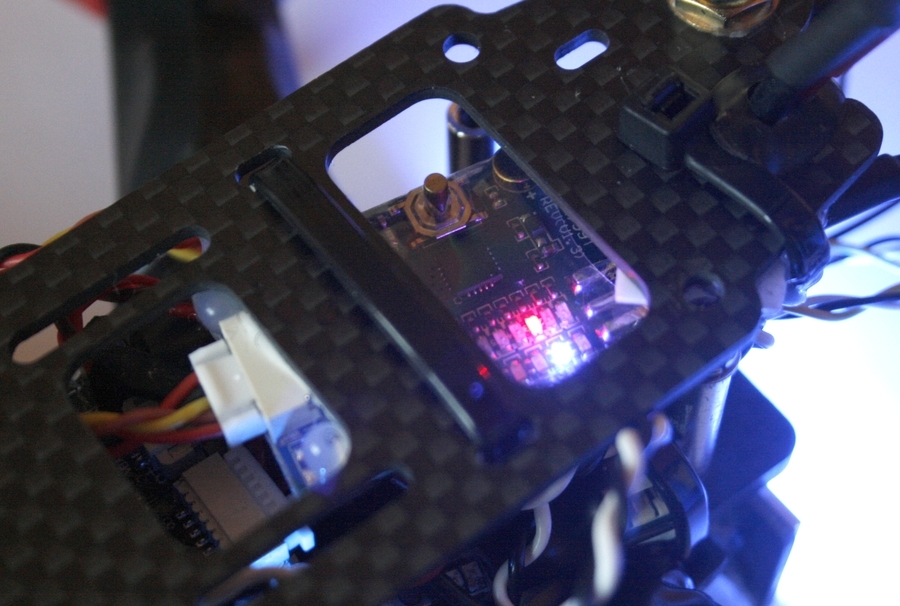
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.

ВНИМАНИЕ! FPV система представляет собой такую цепочку: камера -> передатчик -> приёмник -> дисплей (очки). Все указанные на сайте комплектующие работают на частоте 5.8MGhz, то есть всё совместимо! Вот вам возможные варианты FPV наборов:
Передающие части:
? Экшн камера (SJCAM, YI, GO PRO) + специальный кабель к передатчику + передатчик (есть готовый комплект)
? FPV камера + передатчик
? FPV камера с передатчиком (Eachine TX02, с антенкой в виде гриба)
Приёмные части:
? Приёмник + дисплей 7?
? Приёмник + оцифровщик Easycap (подключается по USB к ноуту или планшету)
? FPV очки (имеют встроенный приёмник. )
NTSC или PAL? PAL – частота кадров (строк) выше, но разрешение ниже, разница конечно минимальна. Ну и у нас PAL в стране – лампочки вечером не будут мерцать и бесить.
RunCam Split 4

Курсовая камера + запись 4К на карту памяти!
Eachine TX06

Камера 700TVL + передатчик 5.8
Foxeer Razer

Одна камера – куча вариантов. OSD на борту
RunCam Phoenix 2

Caddx Ratel 2

1200TVL, OSD на борту
EKEN H9

Самая дешёвая экшн-камера
Eachine TX805

Eachine TX526

Дисплей

Дисплей

OTG FPV

Приёмник для смартфона
Антенна “леденец”

Новый тип антенн под 5.8
Eachine EV800

Самый дешёвый шлем
Eachine EV800D

Eachine EV100

Самые дешёвые очки
Eachine EV300D

Более дорогие очки
Fat Shark Attitude V6

ПОЛЁТНЫЕ КОНТРОЛЛЕРЫ
APM2.8

Наборы

Pixhawk

ВИДЕО
СОВЕТЫ ПО СБОРКЕ
ВАЖНОЕ
1. Во время калибровки регуляторов ПРОПЕЛЛЕРЫ ДОЛЖНЫ БЫТЬ СНЯТЫ, иначе можно порубиться в капусту
2. Перед включением очков, шлема и передатчика видео АНТЕННА ДОЛЖНА БЫТЬ УСТАНОВЛЕНА, иначе сгорит электроника
СБОРКА РАМЫ И УСТАНОВКА ЭЛЕКТРОНИКИ
1. Используйте синий фиксатор резьбы для сборки резьбовых соединений рамы. Без него – может открутиться.
1.1 Если взять красный – конструкция получится неразборная.
1.2 Старайтесь наносить фиксатор на винт, а не на гайку.
2. Крепите регуляторы к лучам на двусторонний скотч и изоленту.
3. Провода между камерой и передатчиком скрутите в тугую косичку.
3.1 Косичка должна быть не параллельна и не перпендикулярна сигнальным проводам от регуляторов и проводам от RC приёмника.
4. RC приёмник желательно вытащить из корпуса, припаять к полётному контроллеру, и отрезать лишние ноги.
4.1 Желательно купить микро версию приёмника, она меньше и легче
4.2 Если у вашего RC приёмника 2 антенны, то они должны быть расположены под 90 градусов друг к другу, и по 45 градусов к горизонту.
5. Между рамой и аккумулятором желательно добавить нескользящую прокладку, например кусочек резины или вспененной китайской упаковки. Либо ленту – липучку.
5.1 Балансировочный шлейф крепите либо лентой прямо вместе с аккумулятором, либо используйте крепление этого шлейфа на основных проводах от аккумулятора.
6. Коннектор аккумулятора желательно припаивать не напрямую в плату распределения питания, а на отрезках ТОЛСТОГО провода длиной 2-3 см. Это упростит подключение/отключение аккумулятора, и уменьшит шанс поломки платы распределения при падении.
7. Докупите грибовидные антенны для FPV, вход: RP-SMA male
8. Курсовая FPV камера в пластиковом корпусе гораздо легче, чем камера в металлическом. Но если вы учитесь летать и боитесь убить камеру, то лучше взять металлическую.
9. HD камера необязательна, просто летать можно и без неё. Она нужна для записи красивых видосов.
10. Для съёмки используйте “новый” и сбалансированный комплект пропеллеров, чтобы на камере не были видны вибрации и “кисель”. Для обычных полетушек годятся поцарапанные и имеющие вмятины пропеллеры.
ПОДКЛЮЧЕНИЕ И ЗАЩИТА ЭЛЕКТРОНИКИ
1. Для защиты электроники от влаги используйте электроизоляционный лак Plastic 71. Наносить в 3 слоя с просушкой в 1 час.
1.1 Качество нанесения защитного покрытия можно контролировать под УФ лампой
2. Провода от моторов (3 штуки) паяйте напрямую к регуляторам, отпаяв родные провода от регуляторов.
3.1 Сделайте это до того, как покрывать плату регулятора лаком.
4. Сигнальные провода от регуляторов к контроллеру паяются в следующем порядке: задний правый, передний правый, задний левый, передний левый.
4.1 Если ваши регуляторы поддерживают DSHOT, чёрные сигнальные провода можно отрезать. Если только OneShot или MultiShot, то делать этого нельзя.
4.2 Земля и сигнальный провод должны быть скручены в косичку. Если у вашего регулятора они идут в виде плоского шлейфа – разъедините их, и скрутите в косичку.
5. Припаяйте танталовый конденсатор с напряжением минимум 6.3 В и ёмкостью 10 – 50 мкФ на шину питания полётного контроллера.
6. Пищалку можно достать из компьютера.
7. Барометр нужно защитить чёрным поролоном. Да-да, именно чёрным.
8. Залейте ноги матрицы FPV камеры эпоксидкой.
9. Запеньте монтажной пеной внутреннюю полость FPV антенны.
10. Залейте эпоксидкой светодиодные панели.
ЗАРЯДКА АККУМУЛЯТОРОВ
Аккумуляторы (грубо) имеют следующие характеристики: напряжение, ёмкость, ток заряда, ток разряда. Напряжение пишется в Вольтах, но по хорошему напряжение определяет число банок S. S (англ. “Series” – последовательный) определяет число ячеек (банок) в аккумуляторе, соединённых последовательно. Напряжение одной ячейки лития составляет 3.7 В (3 В минимум, 4.2 В максимум). Таким образом параметр S определяет диапазон напряжений, в которых работает ваша сборка. В умных зарядниках типа IMAX B6 при зарядке выставляется именно число банок S, напряжение зарядник определит сам. Ещё есть индекс P (англ. “Parallel” – параллельный), обозначающий число банок, соединённых параллельно. Например код 3S2P означает, что аккумулятор состоит из 6 банок, 3 сборки последовательно по 2 параллельно соединённых аккумулятора.
Зарядный и разрядный токи напрямую зависят от ёмкости аккумулятора, и связаны через параметр С – токоотдача (токоприём). Чтобы перевести ёмкость в Амперы, нужно ёмкость в Ампер*часах умножить на токоотдачу. Например на аккумуляторе вы можете прочитать 1300 mah 70 С, то есть это 1.3 Ампер часа * 70 = 91 Ампер. Это максимальный ток, который можно снять с аккумулятора без вреда для него. Параметр очень важный, например при проектировании коптера нужно брать акум, который сможет отдать ток, равный сумме максимальных токов через регуляторы оборотов. Например есть 4 регулятора по 25 А каждый, значит суммарный ток 100 А. Хотим акум ёмкостью 3500. 100 / 3,5 = 28, округляем в большую сторону => 30. Нужен акум с ёмкостью 3500 mah и отдачей 30 С. В характеристиках акума токоотдача называется Discharge Rate.
Зарядный ток для обычных LiPo аккумуляторов не должен превышать 1 С, то есть быть меньше или равным ёмкость аккумулятора в Ампер*часах. При токе в 1 С аккумулятор зарядится за 1 час. То есть наш аккумулятор из предыдущего примера можно заряжать током 3,5 А максимум. Можно 1 А, 2 А, 3 А, но вот 4 А уже не рекомендуется. Сейчас есть мощные модификации LiPo аккумуляторов, например графеновые (Infinity RC Graphene). У них в характеристиках можно найти строчку Charge Max Rate: 5C, то есть заряжать можно током, в 5 раз превышающим ёмкость! А это значит, что акум зарядится за 1/5 часа, то есть за 12 минут! Но зарядник и БП такой мощности ещё нужно поискать (пример: гоночный акум из моего видео 1300 mah, заряжать можно током 6.5 А). В зарядниках типа IMAX B6 зарядный ток ставится вручную, и не должен превышать допустимого для аккумулятора, а также мощность (напряжение * ток) не должна превышать мощность вашего БП, иначе будет ошибка.
Что касается хранения аккумуляторов: у меня на канале есть видео “советы по использованию литиевых аккумуляторов”, вот информация оттуда подходит. Основные моменты:

Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.

Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.

Читайте также: