Октокоптер своими руками
Добавил пользователь Дмитрий К. Обновлено: 08.09.2024
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.

Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.

Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
С чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.

Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
- Двигатели для дрона нужно выбирать с запасом. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены.
- Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.
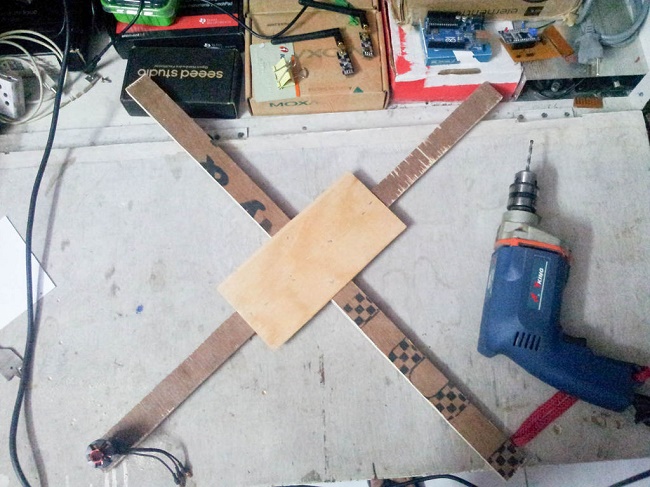


Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.
Совет! Для начинающих рекомендуется купить готовую раму для сборки. Пользователь сразу получает изделие, у которого предусмотрено место для размещения батарей, двигателей, до минимума снижена масса.
Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
- Трехлопастные пропеллеры дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
- система взаимодействия по радио или Wi-Fi каналу;
- GPS для ориентирования и движения по маршруту;
- схема позиционирования, работающая не в 2, а в 6 и более степенях свободы;
- система автоматического гашения инерции, позволяющая дрону висеть полностью неподвижно и сразу останавливаться при поступлении команды баз паразитных раскачиваний.

От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.
- Делается рама, сборкой готового комплекта или создания конструкции из подручных материалов.
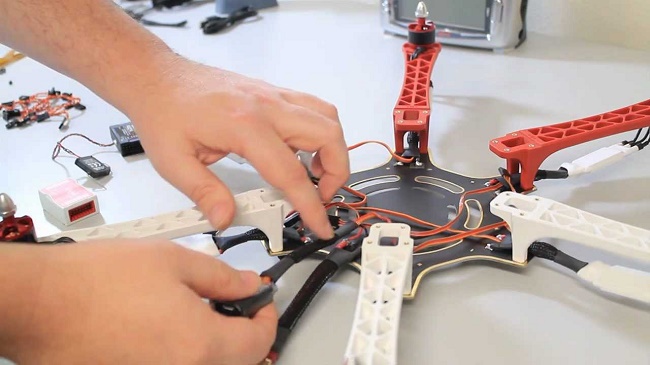
- На центральную пластину рамы крепится электроника управления. Это плата, регулирующая обороты двигателей и обрабатывающая сигналы с пульта.
- К плате управления присоединяется приемник радиосигнала. Его можно закрепить на раме термоклеем.
- Строго на равных расстояниях от центра рамы до оси привода, на ногах сверлятся отверстия для крепления двигателей.
- Прокладываются провода, силовая сеть управления двигателями. Если покупался комплект оборудования, в нем есть все нужные проводники и инструкция. В случае, когда работа делается своими руками, стоит помнить: проводка соединяется в соответствии с типом управляющей платы, схема подачи питания параллельная.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.


В качестве заключения
Если не экономить на покупке комплектующих, собрать самодельный дрон не составит труда. Достаточно действовать аккуратно, в соответствии с инструкциями производителя тех или иных компонентов. Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
KK2.1 Это, наверное, первое, что вы найдете при поиске контроллера полета в Интернете. Он основан на AVR микроконтроллере, имеет ЖК-дисплей, который позволяет запрограммировать его без подключения к ПК, а также MPU6050 в качестве датчика. Запрограммировать его можно с помощью собственной прошивки, но для этого понадобится ISP программатор AVR, так как он не имеет выходов на плате. Еще он дешев, требует ручной настройки и прекрасно подходит для опытных пилотов.
KKMulticontroller Это что-то уникальное в линейке контроллеров! В его основе Atmel AVR (168p), что хорошо, вот только думаю контроллер больше не поддерживается, так как их сайт закрыт. Возможно они перешли на 32-битные квадрокоптеры или что-то еще. Сам контроллер устарел, использует Murata Gyros для ориентации положения в пространстве, датчики не взаимосвязаны, гироскоп аналоговый, для настройки используются навески на стрелы, то есть все просто, но старо…
Для своей мозгоподелки
я взял OpenPilot CC3D из-за простоты его настройки.
Шаг 7: Пульт управления
Управляется самоделка
, естественно, беспроводным пультом управления. Их выбор достаточно большой, от дорогих — Futaba, Spektrum, до дешевых — Turnigy и Flysky.
Количество каналов пульта означает количество передаваемых сигналов управления, нам нужно как минимум 4 канала:
Дроссель Yaw (вращение относительно оси Z) Pitch (вращение относительно оси Y – ось проходящая через левую и правую стороны) Roll (вращение относительно оси X — ось проходящая через перед и зад коптера)
В дальнейшем, для использования на квадрокоптере-самоделке
видеокамеры понадобятся еще каналы, поэтому я выбрал 6-ти канальный Flysky. Это дешевый пульт, но для полетов большой дальности он не подходит. Итак, по своим бюджетным возможностям выбираем пульт для
поделки
.
Шаг 8: Монтаж контроллера полета
Пульт и контроллер полета выбраны, осталось закрепить этот контроллер на раме квадрокоптера, добавить батарею и приступить к калибровке мозгоподелки
. Сверху рамы крепим контроллер на хомуты-стяжки, при этом стрелка на контроллере расположена по оси X. Еще момент, для гашения вибраций моторов между рамой и контроллером помещаем обычную губку.
Шаг 9: Подключение и настройка электроники
По инструкциям подключаем контроллер полета, регулятор скорости и пульт управления. И поможет вам в этом следующее видео:
А если у вас пульт Flysky, то и это видео:
Шаг 10: Тестирование
Прежде чем приступить к первому полету, нужно протестировать все компоненты, используя систему контроля OpenPilot GCS. Она имеет дисплей, с помощью которого удобно тестировать датчики и остальные компоненты. Итак, снимаем пропеллеры и с пульта проверяем функционирование всех частей самоделки
Я еще проверил диапазон пульта размещая квадрокоптер рядом и на значительном расстоянии. А правильное функционирование пропеллеров можно узнать по характерному звуку при их вращении.
Шаг 11: И наконец: полет
Квадрокоптер, в принципе, опасное устройство, которое при неправильном использовании может нанести серьезный ущерб, поэтому будьте осторожны и ответственны при работе с ним!
К низу рамы подвешиваем батарею, подключаем ее и располагаем поделку
на открытом месте. Затем с безопасного расстояния от квадрокоптера начинаем постепенный запуск
мозгоподелк
и. Если вы чувствуете, что
поделка
при подъеме сваливается, плывет в сторону, то откорректируйте это навесками на соответствующие стрелы. Добившись стабильного подъема, проверьте, как квадрокоптер реагирует на команды пульта, и настраивая значения PID, получите желаемый отклик.
А теперь поздравляю, в с нуля создали своими руками собственный квадрокоптер!
Вы, как начинающий пилот, решили разобраться в том, как сделать радиоуправляемый квадрокоптер на пульте управления (мини или с камерой) своими руками в домашних условиях. Задача, на первый взгляд, простая, но есть уйма нюансов, на которые следует обратить внимание — об этом в нашей подробной инструкции.
Миф о полной дешевизне
Если вы новичок в авиамоделировании, то следует смириться, что это не дешёвая затея.
Приглядитесь — это прикол. Очень жаль, если вы поверили, что саморезы, пластиковая посуда и алюминиевые уголки смогут в сборе стать полноценным коптером.
Разочаровала информация? Тогда лучше уж купить готовый квадрик RTF (готов к полету, ready to fly) и не морочить голову.
Детали самодельного квадрокоптера
Двигатели для квадрокоптера, 4 шт — D2822/14 1450kv
Конечно, дополнительная покупка мелкого квадрокоптера немного накладна, но, летая на таком вы научитесь управлять и сможете летать на большом квадрокоптере с камерой без падений! А мелкую игрушку всегда можно будет подарить ребенку.
Ну и на последок, небольшое видео полета на квадрокоптере, запись с камеры.
В этой статье мы рассмтрели основные прнципы изготовления самодельных квадрокоптеров. Если вы хотите узнать больше — смотрите раздел
iskra комментирует:
как сделать квадракоптер чтобы он летал в радиусе 500 метров с камерой реального времени которая выводит изображение на экран
chelovek комментирует:
Ребят помогите! хочу собрать квардрик на платформе ардуино мега с использованием вот этох компонентов:
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит , разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а или raspberry pi.
Из подручных материалов
Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Что потребуется в самом начале
Если всё-таки есть желание , то для начала следует иметь руки из правильного места, а именно, из плеч. Также хотя бы поверхностные познания в электронике и немного — в программировании, решительность и отсутствие лени и, конечно же, детали по списку.
Ах да, ещё следует определиться с основной функцией дрона. В самом начале лучше делать квадрокоптер без камеры. Нужно набить руку в управлении, чтобы одно из дорогостоящих оборудований не разбилось или утонуло.
Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк также не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
- рама;
- моторы с контроллерами для них;
- винты;
- аккумулятор для квадрокоптера и пульта управления;
- полётный контроллер;
- пульт управления с приёмом и передачей сигнала;
- зарядное устройство;
- соединительные провода, болтики и прочее;
- инструменты для работы.
Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Выбор формы квадрокоптера
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры. Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Из названия статьи понятно, что речь пойдёт о дронах, у которых четыре оси (и стандартно четыре мотора). Форма расположения лучей на квадролёте тоже бывает разная (+, Х или Н — образные).
Наиболее популярной моделью среди коптероводов остаётся quatrocopter с расположением лучей в форме Х (его можно увидеть на схеме). Во-первых, сразу два мотора тянут вперёд всю конструкцию, а во-вторых, прицепленная видеокамера не будет видеть перед собой винты.
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV- , следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а также для тестирования коптера в домашних условиях на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Если в перспективе использование экшн-камеры, следует оставить место для приёмника и передатчика сигнала камеры на планшет и место для ее крепежа.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Аккумуляторы для моторов могут быть разными по ёмкости. Лучше предоставить возможность менять аккомы на большие мощности и, конечно же, использовать не один, а сразу несколько.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Дополнительные функции:
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Квадрокоптер своими руками с подъемом 200 кг
Основы коптеростроения. Григорий Колодяжный, Пятигорск.


Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки. Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели. 1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить. 2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580


Читайте также: