Катер на ардуино своими руками для начинающих
10 интересных проектов для Ардуино
Arduino – это универсальная платформа для самоделок на микроконтроллерах. К ней есть множество шилдов (плат расширения) и датчиков. Это многообразие позволяет сделать целый ряд интересных проектов, направленных на улучшение вашей жизни и повышение её комфорта. Сферы применения платы безграничны: автоматизация, системы безопасности, системы для сбора и анализа данных и прочее.
Из этой статьи вы узнаете, что можно сделать интересного на Ардуино. Какие проекты станут зрелищными, а какие полезными.
Что можно сделать с помощью Arduino
Робот пылесос
Уборка в квартире – рутинное занятие и малопривлекательное, тем более на это нужно время. Сэкономить его можно, если часть хлопот по дому возложить на робота. Этого робота собрал электронщик из г. Сочи – Дмитрий Иванов. Конструктивно он получился достаточно качественным и не уступает в эффективности заводским аналогам.
Для его сборки вам понадобятся:
1. Arduino Pro-mini, или любая другая подобная и подходящая по размерам.
2. USB-TTL переходник, если вы используете Pro mini. Если вы выбрали Arduino Nano, то он не нужен. Он уже установлен на плате.
3. Драйвер L298N нужен для управления и реверсирования двигателей постоянного тока.
4. Маленькие двигателя с редуктором и колесами.
6. Двигатель для турбины (побольше).
7. Сама турбина, а вернее крыльчатка от пылесоса.
8. Двигателя для щеток (небольшие).
9. 2 датчика столкновения.
10. 4 аккумулятора 18650.
11. 2 преобразователя постоянного напряжения (повышающий и понижающий).
13. Контроллер для работы (заряда и разряда) аккумуляторов.
Система управления выглядит следующим образом:
А вот система питания:
Подобные уборщики развиваются, модели заводского изготовления обладают сложными интеллектуальными алгоритмами, но вы можете попытаться сделать свою конструкцию, которая не будет уступать по качеству дорогим аналогам.
Управление RGB-лентой со смартфона и Arduino
RGB-ленты способны выдавать световой поток любого цвета, в них обычно используются светодиоды в корпусе которых размещено три кристалла светящиеся разным цветом. Для их управления продаются специальные RGB-контроллеры, их суть заключается в регулировании тока подаваемого на каждый из цветов светодиодной ленты, следовательно – регулируется интенсивность свечения каждого из трёх цветов (отдельно).
Вы можете сделать своими руками RGB-контроллер на Ардуино, даже более того, в этом проекте реализовано управление через Bluetooth.
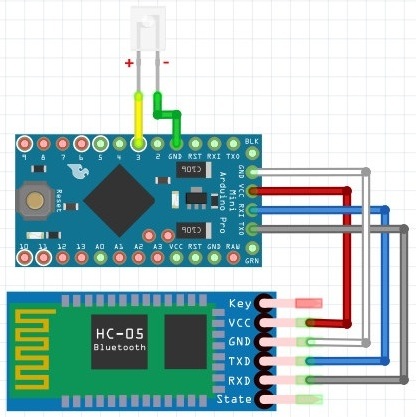
На фото приведен пример использования одного RGB-светодиода. Для управления лентой потребуется дополнительный блок питания на 12В, тогда ШИМ-выходы Arduino будут управлять затворами полевых транзисторов включенных в цепь. Ток заряда затвора ограничен резисторами на 10 кОм, они устанавливаются между пином Ардуино и затвором, последовательно ему.
Автор использовал для связи со смартфоном Bluetooth, для этого был куплен модуль HC-05.
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
Пульт управления на базе Arduino и смартфона
С помощью микроконтроллера можно сделать универсальный пульт дистанционного управления управляемый с мобильного телефона.
Для этого понадобится:
Arduino любой модели;
Bluetooth-модуль HC-05 или HC-06.
Проект может считывать коды с заводских пультов и сохранять их значения. После чего вы можете управлять этой самоделкой через Bluetooth.
Система распознавания лиц и слежения за ними
Веб-камера устанавливается на поворотный механизм. Её подключают к компьютеру, с установленным программным обеспечением. Оно базируется на библиотеке компьютерного зрения – OpenCV (Open Source Computer Vision Library), после обнаружения программой лица, координаты его перемещения передаются на плату Arduino через USB-кабель.
Ардуино даёт команду приводу поворотного механизма и позиционирует объектив камеры. Для движения камеры используется пара сервоприводов.
На видео изображена работа этого устройства.
Следите за своими животными!
Идея заключается в следующем – узнать, где гуляет ваше животное, это может вызвать интерес для научных исследований и просто для развлечения. Для этого нужно использовать GPS-маячок. Но чтобы хранить данные о местоположении на каком-нибудь накопителе.
При этом габариты устройства здесь играют решающую роль, поскольку животное не должно ощущать от него дискомфорт. Для записи данных можно использовать Arduino шилд для работы с картами памяти формата Micro-SD.
Ниже приведена схема оригинального варианта устройства.
В оригинальной версии проекта использовалась плата TinyDuino и шилды к ней. Если вы не можете найти такую, вполне можно использовать маленькие экземпляры Arduino: mini, micro, nano.
Для питания использовался элемент Li-ion, малой ёмкости. Маленького аккумулятора хватает примерно на 6 часов работы. У автора в итоге все поместилось в обрезанную баночку из-под тик-така. Стоит отметить, что антенна GPS должна смотреть вверх, чтобы получать достоверные показания датчика.

Взломщик кодовых замков
Для взлома кодовых замков с помощью Ардуино понадобятся серво- и шаговый двигатель. Этот проект разработал хакер Samy Kamkar. Это достаточно сложный проект. Работа этого устройства изображена на видео, где автор рассказывает все подробности.
Конечно, для практического применения такое устройство вряд ли подойдет, но это отличный демонстрационный.
Ардуино в музыке
Это скорее не проект, а небольшая демонстрация какое применение нашла эта платформа у музыкантов.
Анализатор спектра звука, с видео выходом.
Транзистор NPN-типа, например 2n3904 – 1 шт.
Резистор 1 кОм (R2, R4, R5) – 3 шт.
330 Ом (R6) – 1 шт.
10 кОм (R1) – 1 шт.
100 кОм (R3) – 1 шт.
Электролитический конденсатор 3.3 мкФ – 1 шт.
Для работы проекта потребуется подключение библиотеки для быстрого разложения в ряд Фурье.
Пошаговое обучение программированию и созданию устройств на микроконтроллерах AVR: Программирование микроконтроллеров для начинающих
3 проекта роботов
Робототехника – одно из интереснейших направлений для гиков и просто любителей сделать что-нибудь необычное своими руками, я решил сделать подборку из нескольких интересных проектов.
BEAM-робот на Ардуино
Для сборки четырёхногого шагающего робота вам понадобятся:
Для движения ног нужны сервомоторчики, например, Tower Hobbies TS-53;
Кусок медной проволоки средней толщины (чтобы выдерживала вес конструкции и не гнулась, но и не слишком толстой, т.к. не имеет смысла);
Микроконтроллер - AVR ATMega 8 или плата Ардуино любой модели;
Для шасси в проекте указано, что использовалась Рамка Sintra. Это что-то вроде пластика, он сгибается в любую форму при нагревании.
В результате вы получите:
Примечательно то, что этот робот не ездит, а шагает, может перешагивать и заходить на возвышения до 1 см.
Робот fijibot с функцией самоподзарядки
Этот проект мне, почему-то, напомнил робота из мультфильма Wall-e. Его особенностью является использование солнечной батареи для зарядки аккумуляторов. Он перемещается подобно автомобилю, на 4-х колесах.
Его составляющие детали:
Пластиковая бутылка подходящего размера;
Солнечная панель с выходным напряжением в 6В;
В качестве донора колес, двигателей и других деталей – машинка на радиоуправлении;
Два сервопривода непрерывного вращения;
Два обычных сервопривода (180 градусов);
Светодиоды, фоторезисторы, постоянные резисторы на 10 кОм – всего по 4 штуки;
Вот основа – плата Ардуино с прото-шилдом.
Вот так выглядят запчасти от радиоуправляемой машины – колеса.
Конструкция почти в сборе, датчики установлены.
Суть работы робота заключается в том, что он едет на свет. Обилие фоторезисторов нужно ему для навигации.
Художник из деталей от CD-приводов
Это скорее ЧПУ станок, чем робот, но проект весьма занимательный. Он представляет собой 2-х осевой станок для рисования. Вот перечень основных компонентов, из которых он состоит:
(DVD)CD-приводы – 2 шт;
2 драйвера для шаговых двигателей A498;
Источник питания 12В;
Шариковая ручка, и другие элементы конструкции.
Из привода оптических дисков используется блоки с шаговым двигателем и направляющей штангой, которые позиционировали оптическую головку. Из этих блоков извлекают двигатель, вал и каретку.
Управлять шаговым двигателем без дополнительного оборудования у вас не выйдет, поэтому используют специальные платы-драйверы, лучше, если на них будет установлен радиатор двигателя в момент пуска или смены направления вращения.
Полный процесс сборки и работы показан на этом видео.
Смотрите также 16 лучших Arduino проектов от AlexGyver:
Заключение
В статье рассмотрена лишь малая капля из всего того, что вы можете сделать на этой популярной платформе. На самом деле всё зависит от вашей фантазии и задачи, которую вы ставите перед собой.
Сам программирую около 2-х лет на ардуине ( на компе больше). Дома стоит проект управления отоплением с использованием твердотопливного и электрического котла. Т. к котельная стоит на улице, то управляю по bluetooth. не выходя из дома.
Конечно это к яхтам не относиться, но опыт не пропьешь. Итак:
1. Самое главное. Необходимо разделить управление контроль и навигацию на несколько микроконтроллеров (далее МК). У меня валяется 4 штуки паленых ардуин. Причем последняя сгорела позавчера без видимых причин. Стояла работала и зависла. Была другая такая же вставил, прошил. Заработало. Поэтому. Управление двигателем один МК, Контроль заряда, разряда другой. Навигация третий. и индикация четвертый. И так далее. Ардуины легко связываются между собой. И тот МК, что отвечает за вывод информации может легко связаться с другим и получить данные. МК лучше иметь однотипные, чтобы была возможность замены
2. датчики, что китайцы делают для ардуины предназначены для детских опытов. Поэтому качество их соответствующее. Поэтому по возможности использовать более дорогие и промышленные датчики и сенсоры. Или брать кучу запасных и возможность их быстрой замены.
3. Информацию все таки лучше выводить на планшет комп или телефон путем поднятия веб сервера на одном из МК и использовать Wi-Fi. Так вы получите инфо и управление в любом месте вашего судна. Ну не считая той инфо, которая нужна постоянна. Типа напряжения борт сети, тахометр. Их лучше на 7 сегментные индикаторы с автоматической настройкой яркости.
Закончил в первом приближении железяку.
Я полностью переключился на курсоуказатель на Ардуино. У меня на деревянной псевдомачте плата в корпусе тильткомпаса с RS232. Там меньше влияние шелезяки. Сам курсоуказатель в рубке. Дисплей 3.2" с резистивным тачем. Встроенный GPS. На основном экране будет дорожка по заданному курсу, скорость, время, курс, отклонение от курса, время хода по кусу, пройденное по нему расстояние, крен, дифферент . может еще чего. Доп экран (переход по кнопке на основном) - ввод ист. курса на точку (от GPSII+ или с планшета, или с нетбука). Истинный курс - результат совместной работы быстрого компаса и корректирующего встроенного GPS приемника. Приблуда полезна в тумане или ночью.
Что получилось конспективно (окучу, приклею фотки). При включении первый экран - дорожка от компаса, две кнопки - текущий курс как заданный и переход в экран наборного поля. На экране (кроме курсовой дорожки) заданный курс, курс от компаса, разность курсов. Скорость по ГПС, путь по заданному курсу, крен(+граф. указатель крена), дифферент, время от ГПС, время в пути по заданному курсу.
Экран наборного поля - 10 кнопок, + кнопка очистки, +кнопка перехода на компасную дорожку, +кнопка перехода на ГПС дорожку (аналогична компасной, только курс от ГПС). Служит для цифрового набора заданного курса.
+5В 250 мА 3.2" экран, встроенный ГПС (57600 на 5 Гц, с возможностью перехода на чисто ГЛОНАСС), ДБ9 для внешнего компаса CMPS10.Быстродействие по каналу компаса и ГПС 5 показаний в секунду. У компаса можно увеличить до 100 Гц, у ГПС до 10. Но. есть сложности - не стал возиться.
Согласен с вами, но этот вариант лучше и на том же саомом процессоре.
На том же сайте можно купить маленькие Arduino совместимые модули (от RPi отличаются низкой проиводительностью, низким потреблением, маленькой памятью, низкой ценой, маленькими габаритами) и датчики к молудям Duino (MEGA, STM32, PIC32, AVR, MSP430 ):
Прибавил еще -курс 787 откл. GPS, курс 878 включить. На всякий случай. Убирается скорость и пройденный путь. Время в пути от внутреннего таймера.
Как движется проект? Как может помочь акселерометр для тонкой настройки яхты?
Не помню на каком форуме,
Что получилось конспективно (окучу, приклею фотки).
Прикрепленные изображения
Рулевой 2-го класса
Я тоже начал возиться с акселрометром и магнетометром но результат получился неудачный - калибрация бесилась и компас отказывался работать как надо. Пока что бросил
Хоть готовый компас и относительно дорогой следует его использовать. Включил и поехал. :-) Все эти алгоритмы самонастройки плохо сходятся и времени их настроить нужна уйма.
Я, кстати, добавил автонастройку требуемых параметров GPS через UBX при запуске проги. Чтобы от встроенной батарейки не зависеть.
О, сходу! Даже на яхте.
Силовую часть несложно сделать. Особенно когда рулежка на гидравлике.
Сложности я вижу в алгоритме кручения верчения руля в зависимости от датчиков. А то оно так нарулить может что потом концов не сыщут..
Силовую часть несложно сделать. Особенно когда рулежка на гидравлике.
Сложности я вижу в алгоритме кручения верчения руля в зависимости от датчиков. А то оно так нарулить может что потом концов не сыщут..
Не вижу больших сложностей. Считаете рассогласование и в зависимости от него пляшете. Естественно ограничивая максимальное "руление" разумными рамками. Даже обратная связь по рулю не нужна.
Рулевой 1-го класса
Силовую часть несложно сделать. Особенно когда рулежка на гидравлике.
Сложности я вижу в алгоритме кручения верчения руля в зависимости от датчиков. А то оно так нарулить может что потом концов не сыщут..
Абсолютная правда.
Тут на форуме я наблюдал уже толпу строителей автопилотов. Все могут и даже некоторые сделали железо для автопилота. А дольше идёт программное обеспечение. Вот здесь все и заканчивается. В лучшем случае ведёт с каким-то перерегулированием по прямой и норовит куда нибудь срыгнуть при малейшем постороннем воздействии на лодку. Необходим достаточно большой багаж знаний в области ТАУ и спецразделов высшей математики. Как правило люди обладающие тем другим и третьим не будут заниматься изготовлением автопилота на коленке т.к. могут это время посвятить зарабатыванию суммы денег, которой хватит и на автопилот и на многое другое останется. Я знаю только один пример когда подобная инициативная работа дала результат, который на голову превзошел все существующее и выпускаемое. Правда в области автопилотов в БПЛА. Но там была перспектива ОГРОМНОГО рынка и у человека работа и хобби были в одном флаконе.
Я прошёл весь ряд прошивок автопилота raymarine g400 oт 2.хх до 3.2хх за 10 лет. И могу сказать, что первые от последних отличаются как телега от мерседеса. У огромной конторы были людские и материальные ресурсы не сравнимые с возможностями одного человека. И то ей понадобилось 10 лет на доводку программного обеспечения.
А сейчас местные энтузиасты быстро сваяют классный автопилот.
Пошёл за попкорном.
Изначально решил сделат чертеж в solidworks и перегнать его в prepakura designer (обалденная программа, позволяет из 3д модели сделать развертку для склейки из бумаги например). Но я конечно же сделать многовато криволинейных поверхностей, хоть и старался по минимому
Картинки половины корпуса или как это правильно называется
так как прямоугольную и без чертежей могу сделать, решил делать все на глаз
не совсем прямоугольную, но не то что хотелось бы
для склейки применял обычный клей для потолочки и подобного, называется жидкие гвозди
чем мне особенно понравился клей это тем что он густой, и его можно распределить почти как хочешь
Видео. Радиоуправляемые катера на Ардуино
Катер собран на Ардуино Uno, но можно использовать и другие микроконтроллеры, например, RobotDyn NANO. Управление производится через Bluetooth модуль HC-05. Для этого была написана простая программа для телефонов на Android в сервисе App Invertor. Подробную инструкцию по изготовлению катера, схему сборки, скетч для Ардуино и приложение для Android вы можете скачать на этой странице.
Увертюра
Принято первое решение: сделать кораблик для завоза прикормки своими руками. Пролистал форумы по RC моделированию, прикинул смету – почесал репу. Выходило по-бедному около 150$ на комплектующие. Да, и задача мне показалась слишком легкой (горе мне наивному).
Принято второе решение: сделать своими руками максимально бюджетный кораблик, а в идеале бесплатно. Честное слово, друзья, не от жадности, а из спортивного интереса.
Видите, как все просто? Преобразовывать сигнал я решил с помощью платы Arduino Uno. Детально рассмотрим этот вопрос в разделе Электроника. А начнем с корпуса.
Модель на воздушной подушке
Данный транспорт невероятно популярен. Он относится к водному и наземному. Такая лодка на подушке из воздуха в состоянии двигаться по воде и по суше одинаково легко. По сути, это вездеход, для него не существует преград.
У модели на воздушной подушке имеется та же юбка из резины, как и у прототипа – имеется вентилятор, который под днище закачивает воздух, за счет чего лодка способна подняться над землёй или водой и перемещаться при помощи вентилятора, установленного у нее сзади. Для моделей с такими подушками в основном необходима вода или ровная поверхность.
Корпус
Изначально я рассчитывал использовать корпус от старой игрушки. Сын (он, так сказать, был в доле) с легкостью презентовал старый пиратский фрегат на колесиках. Но при предварительном взвешивании предполагаемого оборудования (аккумулятор, мотор, электроника, и т.п.) оказалось, что фрегату не хватает грузоподъемности.
К сожалению, я не смог найти в магазинах подходящей по форме игрушки за адекватную цену. И решил делать корпус для своего рыболовного кораблика самостоятельно. Опять-таки, пролистав множество форумов и статей, решил, что материалом послужит стекловолокно и эпоксидная смола.
Изготовление корпуса для кораблика я начал с построения болванки, на которую потом планировал наносить материалы. Болванку делал так: из ДВП и картона сделал остов. Закрепил его просто горячим клеем к листу ДВП.
Потом отсеки остова начал заполнять гипсом (алебастр). Маленький лайфхак: добавьте в алебастр немного уксуса, и он будет медленнее застывать, но при этом идет интенсивное выделение газов, так что не забывайте проветривать помещение.
Когда болванка подсохла, я ее немного подправил и обклеил бумажным скетчем, чтоб потом было легче отделять ее от корпуса.
Стекловолокно, которое я использовал, еще называется стекломат. Продавец сказал, что для кривых форм лучше использовать его. Эпоксидка самая простая.
И снова минутка ТБ: Работать нужно в ХОРОШО проветриваемых помещениях. Не шучу. Это вам не в спичечном коробке мешать пару капель. Пару раз над корпусом рыболовного кораблика нагнулся во время нанесения слоя эпоксидки, и потом три дня отдышаться не мог и голова болела.
Далее самое муторное занятие — шпатлевка. Использовал вот такую универсальную шпатлевку со стекловолокном.
А также очень много грубой наждачной бумаги. Дальше процесс понятный: трешь, шпатлюешь, трешь, шпатлюешь. И так, пока не поймешь, что это лучшее, что ты способен сделать своими руками.
Когда я снял корпус с болванки, его вес составлял 1 кг 200 гр. Что довольно-таки хорошо для такой жесткости и такой грузоподъемности.
Порядок работы
1. Сборка корпуса катера-катамарана. — рисуем эскиз катера:

— сделав разметку, разрежем по красным линиям; — согнем по тонким линиям и углам сгиба: 1 – наклон носа катера; 2 — подъем носа катера; 3 – подъем кормы; 4 – наклон кормовой части; — скрепками скрепим согнутые детали; — склеим бумагу любым клеем, после чего форма катера будет готова; — измерим водоизмещение катера; — сделаем форму жесткой, для чего обернем корпус внутри целлофаном и наполним наполнителем; — на полученную болванку, обмотанную стеклотканью, наносится эпоксидная масса; — после застывания корпус легко снимается; — для катамарана также делается второй корпус.
Мотор. Муфта. Дейдвуд. Винт
В этой главе расскажу о том, что является самым пугающим в судостроительстве для начинающих – о самодельном дейдвуде (гидроизолированный вал) и о том, что находиться по обе стороны от него: о винте и о моторе. Ну и как все это соединить своими руками, чтоб оно надежно и безотказно работало на прикормочном кораблике.
Самодельный дейдвуд для кораблика состоит из таких составляющих:
- Корпус — представляет собой тонкостенную трубку от старого холодильника. Внешний диаметр 5мм, внутренний – 4,5мм. Края пришлось вручную раскатать, чтоб по обе стороны встали подшипники с внешним диаметром 6 мм.
- Вал – это прут из нержавеющей стали диаметром 3 мм. С одной стороны нарезал резьбу М3 для крепления гребного винта.
- Подшипники 3*6*2 мм. Подшипники заказывал у китайца. На фото были подшипники с пыльниками, а по прибытию оказалось, что вместо пыльника там лишь проволочка какая-то. Китаец деньги вернул, но я решил уже ставить те, что есть.
- Сальники. Их роль исполняют изоляционные втулки TO-220 (радиодетали, если что).
На фото выше и на видео ниже видно, как собирается дейдвуд.
При работе, масло около подшипников может нагреваться и становиться более жидким, поэтому я решил добавить еще сальники из простых резиновых колечек 3/5 мм. Вставляются они прямо перед подшипником.
В качестве густой смазки я использовал ЛИТОЛ-24. Есть несколько нюансов в заполнении дейдвуда. Нужно забить корпус дейдвуда смазкой так, чтоб внутри была только смазка, а не половина смазки, половина воды. Для этого у шприца отрезается носик, чтоб получилась прямая трубка. Вынимается поршень. И такая трубка просто вставляется в бочонок (или что там у вас) со смазкой по самый край. Потом вставляется поршень в шприц, и только тогда мы вынимаем шприц полностью забитый смазкой без воздуха.
Что касается муфты, то считаю своим долгом сообщить, что муфту нужно брать заводскую. Проверил множество самодельных резиновых и металлических вариантов, но пока не купил нормальную муфту и не выставил мотор в отвес, были постоянные проблемы с надежностью и биением.
При выборе мотора я был ошарашен ценами, поэтому начал искать альтернативы. Нашел самый мощный из дешевых – это электродвигатель 540-4065.
Думаю, что можно было даже взять немножко слабее моторчик, но не утверждаю, так как не проверял пока свой прикормочный кораблик с более слабыми моторами. Возможно, когда-то дойдет до этого дело, с целью увеличить запас хода от одного заряда АКБ.
Гребной винт делал самостоятельно из латуни толщиной 1 мм. Вырезал три одинаковых лопасти в форме поросячьего уха. И припаял их к бронзовой стойке с резьбой М3. Получилось хорошо, но советую купить, или придется делать приспособу для пропорциональной спайки лопастей.
После первых тестов стало ясно, что все работает хорошо, но при одном условии: если дейдвуд имеет точку опоры не далеко от винта. В моем случае винт находится на солидном отдалении от выхода дейдвуда из корпуса. Решил сделать фиксацию относительно корпуса водомета, припаяв три гайки МЗ к дейдвуду и соединив винтами водомет и дейдвуд.
Кораблик для прикормки своими руками – чертеж, этапы сборки
Для изготовления катеров для прикормки понадобится потратить немало средств, размер которых будет зависеть от оснащения устройства. Кроме того, что кораблик требует хороший источник энергии, его дополнительно можно оборудовать навигатором, подсветкой и эхолотом.
Чтобы сделать карповый кораблик своими руками, понадобится:
- два двигателя (редуктора и хода), которые можно взять от старого кассетного магнитофона;
- эпоксидная смола;
- армированная стеклоткань;
- редуктор для детского автомобиля (коэффициент редукции около 1:75);
- нержавеющая проволока для антенны;
- крепежные рейки для двигателей;
- корпус от пульта управления для ПУ корабликом;
- четырехлопастной гребной винт в 500 мм из нержавеющей стали;
- вал винта в 2,5 мм из нержавейки;
- два барабана для сброса прикормки и грузила.
Водомет и поворотный механизм
При проектировании своего прикормочного кораблика я одновременно соотносил размер гребного винта, баллона для водомета и поворотного механизма. В результате перебора множества вариантов, остановил свой выбор на баллоне от дезодоранта. Внешний диаметр баллона составляет около 42 мм., что на 4 мм больше окружности винта, и на 3 мм. меньше диаметра поворотного механизма, который будет описан ниже.
После 153-х замеров я дрожащими руками вырезал отверстие в только что законченном корпусе своего кораблика.
Водомет вклеил на горячий клей. Сделал выемку для забора воды. Решил добавить кусочек алюминиевой перфорации для дополнительной жесткости баллона, так как метал в нем совсем тонкий и легко прогибался при небольших усилиях.
Далее я прикрепил к корпусу прикормочного кораблика крепление двигателя. Делал это таким образом: на дейдвуд прикрепил винт и жесткую муфту. К муфте – мотор, зафиксированный в креплении. После этого я выставил кораблик в таком положении, чтоб дейдвуд занял максимально вертикальное положение, при этом мотор оказывается в свободном подвешивании.
Осталось нанести немного клея, чтоб зафиксировать правильное положение крепления, а после его остывания, нанести уже количество клея необходимое для надежной фиксации.
Рычаг для поворота сделан из стеклотекстолита толщиной 3 мм. Вырезал приблизительную форму, а потом вытесал напильником и наждачной бумагой выемку по форме баночки от корма.
Взял спицу от зонтика (толщина 2 мм.) и продел ее во влагозащитный пыльник для тяг (33х12мм).
Конец спицы загнул под углом 90 градусов и завел в сервопривод SG-90.
Катера отличаются расцветками, размерами, комплектациями, типом управления. Существует 2 вида пультов: инфракрасные и радиопульты. Катер радиоуправляемый с радиопультами будет стоить дороже, так как радиус действия имеет фиксированный, при этом инфракрасное управление подвержено освещению. У таких моделей радиус действия при ярком свете сокращается, при этом ночью показывает прекрасный результат.
Есть модели, которые могут на суше включаться, вторые снабжены специальными предохранителями, при этом лишь при попадании в воду начинают работать.
Электрическая схема
Все остаются на местах и никто никуда не убегает. Боятся нечего. Ниже приведена полная электрическая схема рыболовного катера. Схема большая, потому что детальная, но сейчас все станет понятно.
Пунктирными линиями выделены отдельные блоки. Некоторые из них вы можете вообще не использовать, а некоторые заменить недорогим купленным аналогом. Лишь одна схема может показаться вам сложной, но вам даже не нужно ее понимать, а спаять при желании можно и то, чего не понимаешь.
Загрузить и скачать схему в большом формате можно
Итак, управление будет реализовано с клавиатуры таким образом:
Схема ДТМФ декодера проста в реализации всего 3 резистора и 1 конденсатор. Я смог все это поместить в штекер мини-джек.
Дальше немного сложнее. Речь пойдет о схеме Ардуино Уно, Ардуино Нано и реле для плат Ардуино. Но все же, схема нарисована детально. И большинство связей однотипны. К примеру, реле К1а-К6а – это реле для Ардуино с питанием 5 В. К каждому реле подходит три провода: +5В, GND (2 провода для питания) и сигнальный.
Эта сложность обусловлена тем, что скетч для поворотов работает без сбоев только в таком порядке. Вот и все; разбор этой схемы закончен.
В наличии были оптореле КР293КП9А. Блок из оптореле выглядит вот так:
Далее, рассмотрим регуляторы напряжения.
В этом блоке их три. Самый маленький и простой – это стабилизатор на 9 В. Он называется LM7809. Он дает на выходе ровно 9 вольт, которыми запитываются Ардуино Уно и Ардуино Нано.
Схема управления мотором:
Схему управления мотором решил делать на реле. Связано это в первую очередь с тем, что они у меня были в наличии.
Лукавить не стану. Для неподготовленных людей эта схема сложная. Но я вам расскажу хотя бы для чего она создана. Возможно, многим станет понятно и то, как она работает.
Далее, одна и та же схема представлена в двух видах: первый – более удобен для монтажа, а второй – для анализа, как работают блокировки. Блокировки сделаны таким образом, что когда включен задний ход, невозможно включить ни малый, ни полный вперед.
На плату поместил реле и клемники. Так выглядит монтаж релейной схемы:
К клемникам припаял выходы с контактов и катушек реле. Обязательно на катушки реле устанавливать диоды. Синие варисторы (2 кружочка) ставить не обязательно.
Согласно схемы соединил контакты реле и питания между собой. Весь этот процесс абсолютно авторский. Я гнался за миниатюризацией. Сделал так. Вы можете сделать более громоздко, но более аккуратно.
Принцип выгрузки прост: даем сигнал на ардуино, срабатывает электрозамок, освобождается бункер с прикормкой и оснасткой. Электрозамком является простой соленоид на 24В от подачи бумаги в лазерном принтере.
Чтоб сила втягивания была больше, я решил повысить напряжение с аккумулятора до 30 В.. Делается это с помощью простого китайского девайса МТ3608, купленного на AliExpress.
Тумблеры, вольтметры и габариты.
Тут схемы радуют глаз своей простотой и дотупностью. Габариты можно реализоввать просто прикрепив на ручку рыболовного кораблика велосипедный фонарь.
Закончу рассказ об электронике такой вот схемой аварийной остановки:
Создана она для того, чтоб при случайном пропадании мобильной связи на рыбалке рыболовный катер не уплыл за горизонт или в камыши.
Принцип работы прост: пока снята трубка и телефон (приемник) в режиме разговора, то на микрофоне гарнитуры есть напряжение. Его можно использовать для управления оптореле, через нормальноразомкнутые контакты которого будет подаваться напряжение на мотор катера. Если закончить вызов или если пропала сеть, напряжение на микрофоне пропадает, оптореле размыкается и мотор останавливается.
Техника изготовления изделия
Радиоуправляемый кораблик для рыбалки своими руками сделать нетрудно, нужно просто соблюдать последовательность выполнения работ:
- Изготовление корпуса. Если используется фанера, то дополнительно придется облицевать ее стеклотканью и обмазать эпоксидной смолой. Это поможет защитить материал от гниения. Вырезать фанеру или стеклопластик необходимо по предварительно нарисованной или скачанной схеме. Для того чтобы герметизировать все швы, необходима монтажная пена.
- Установка силового каркаса. Благодаря ему нагрузка на корпус распределяется равномерно, и он остается на плаву. Нос кораблика можно заполнить пеной, которая гарантирует его непотопляемость.
- Монтаж трубы с винтом. Лопасти движущего компонента остаются внутри корпуса, поэтому они не запутаются в водорослях, не поранят рыбу, а также не зацепятся за корягу. Отверстие трубы дополнительно нужно закрыть решеткой.
- Обустройство электронной части. Вот теперь устанавливается двигатель, дейдвудная труба, вал с муфтой и гребной винт. Чтобы рыболовный катер мог плыть в заданном направлении и поворачиваться, нужно оснастить его регуляторами.
- Монтаж серводвигателей для открывания емкостей с прикормкой. Они должны находиться в корпусах, внутрь которых не попадает пыль и влага.
- Установка аккумуляторов.
Для управления изделием лучше выбрать пятиканальную радиосистему, которая устанавливается на игрушки.
Программирование микроконтроллеров Ардуино
Ардуино – это, если кто не знает, микроконтроллеры для широкой публики. Весьма доступно и просто. Грубо говоря: подключил через USB к компьютеру, загрузил на него скетч (программа, в которой написано, что микроконтроллер будет делать) и все готово. Процесс установки драйверов и программы для загрузки описывать не буду. Все можно взять на сайте Arduino.
Если будут вопросы, то в сети полно детальных описаний этого процесса.
В моем прикормочном катере используется две платы Ардуино: одна УНО и одна НАНО.
Радиоуправляемый катер своими руками на Ардуино ? идеальный проект для начинающих. Рассмотрим технологию изготовления, какие необходимы детали для проекта.
Видео. Радиоуправляемые катера на Ардуино
Катер собран на Ардуино Uno, но можно использовать и другие микроконтроллеры, например, RobotDyn NANO. Управление производится через Bluetooth модуль HC-05. Для этого была написана простая программа для телефонов на Android в сервисе App Invertor. Подробную инструкцию по изготовлению катера, схему сборки, скетч для Ардуино и приложение для Android вы можете скачать на этой странице.
Как сделать радиоуправляемый катер Ардуино
Для этого проекта нам потребуется:
Если вы будете использовать моторы от наборов Ардуино, то транзисторы не понадобятся. В данном проекте использовались советские моторчики на 3,5 В, которым не хватает Ампер от пинов на плате, поэтому моторчики подключались к порту Vin (источник питания платы), через резистор, чтобы снизить напряжение. Включение и выключение моторов постоянного тока производится через транзисторы.
Изготавливаем катер на Ардуино своими руками
Фото. Изготавливаем катер на Ардуино своими руками
Схема катера с радиоуправлением на Ардуино
Скетч для блютуз катера на Ардуино
В отличии от лодки на Ардуино, где для передвижения использовался один мотор с винтом, в данном проекте используется два мотора и гребное колесо. При этом отпадает необходимость использовать сервопривод, который потребляет большое количество энергии, для изменения направления движения. Повороты катера осуществляются попеременным включением моторов по Блютуз сигналу.
Катер на Ардуино с блютуз управлением своими руками
Для изготовления гребного колеса использовалась обычная фанера и пластик. Диаметр колеса следует выбрать такой, чтобы лопасти доставали до воды. Сами лопасти вырезаются из ПЭТ бутылки, вставляются в прорези на колесе и фиксируются термоклеем. Также вы можете покрасить гребные колеса, защитив фанеру от разбухания в воде, а пеноплекс от краски на основе ацетона только разъест.
Делаем радиоуправляемую модель лодки на Ардуино Нано
Делаем на основе Arduino Nano модель катера или лодки из пенополистирола на радиоуправлении через Bluetooth.

Шаг 1. Комплектующие
Для этого проекта нам понадобится не так уж много деталей.
| № | Деталь | Кол-во |
| 1 | H-мост SparkFun Dual H-Bridge L298 | 1 |
| 2 | Модуль Bluetooth Low Energy (BLE) HC-06 | 1 |
| 3 | Сервопривод | 1 |
| 4 | Arduino Nano R3 | 1 |
Также нам понадобятся следующие приложения:
Шаг 2. Создаем корпус катера или лодки
Обычно всё начинается тогда, когда хочется попробовать управлять моделью катера на радиоуправлении, но покупать подобную модель дорого или нет желания. Поэтому мы переходим к созданию корпуса. Мы нашли рисунки лодки в Интернете и решили сделать его из пены.



Шаг 3. Двигатель, штурвал, пропеллер
Следующим шагом мы сделали крепление для двигателя. Также мы сделали рулевое колесо и пропеллер. В конечном итоге их заменили купленные.




В итоге мы получили такой результат:

Вал гребного винта с валом двигателя соединен с помощью муфты.

Шаг 4. Принципиальная схема
Так как на следующем шаге мы будем размещать электронику на корпусе нам нужно собрать все электронные детали вместе.

Шаг 5. Закрепляем электронику

Шаг 6. Скетч для проекта
Вы можете скачать или скопировать код для проекта Ардуино катера ниже.
Итоговый результат вы можете увидеть на первой фотографии к данному уроку.
Надеемся, что у вас не возникло проблем при реализации проекта.
sjigalov › Блог › Модель радиоуправляемого катера своими руками. Часть 1.

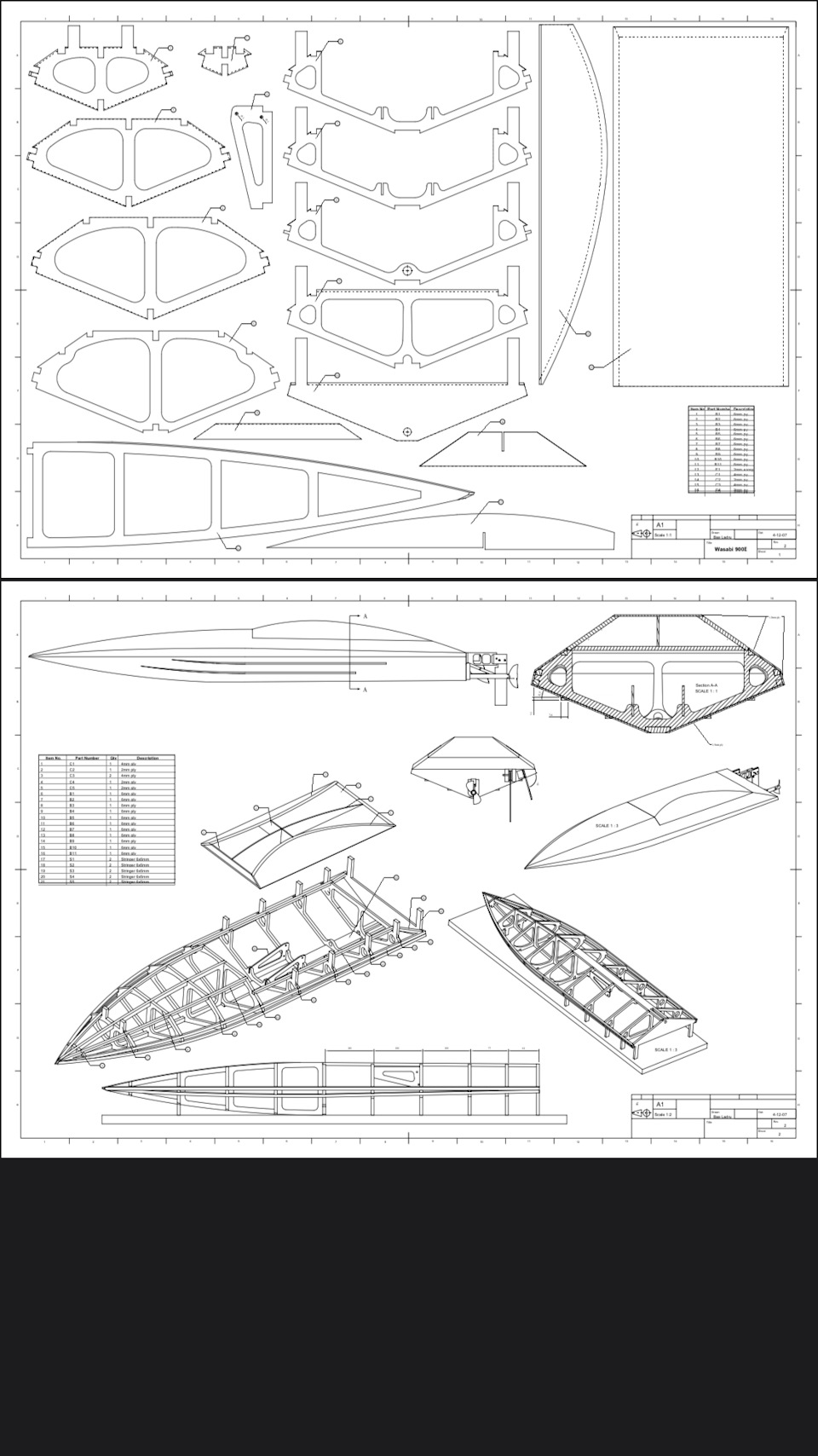
900 — это длина катера в мм. Так же видел чертежи на 1300 мм для катера с ДВС.
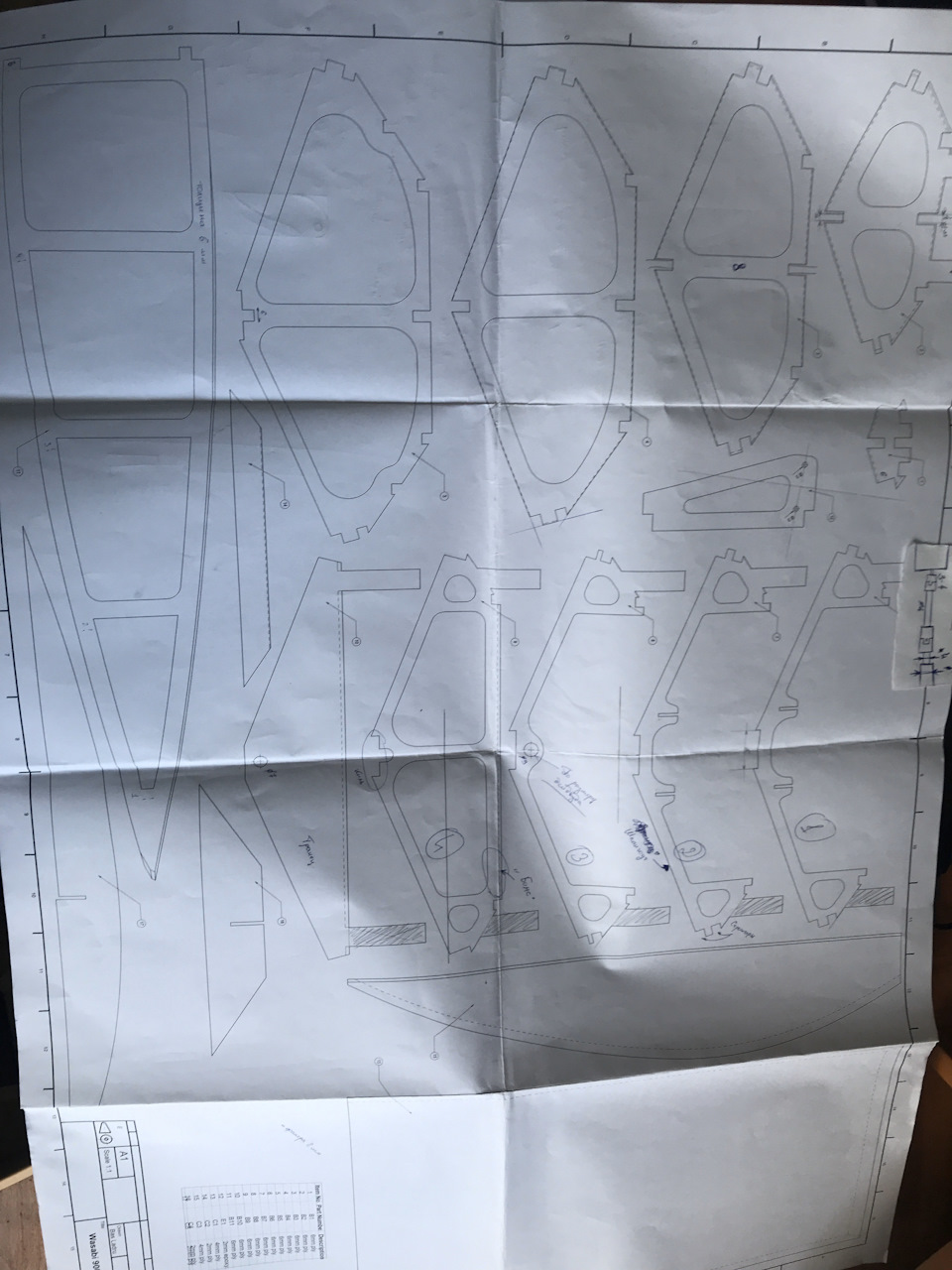
Поехал в печатный центр и распечатал чертежи в формате А1. Оригинальный pdf файл именно такого формата. Все распечаталось с точностью до мм. (У меня курсовые даже с такой точностью никогда не печатались, даже если по размеру были созданы). Печатаем 2 копии, а лучше 3, на всякий случай.
Одна копия основной чертёж, для сверки, второй для трафарета. Третий — пусть будет.
Идём в нормальный строительный магазин и смотрим фанеру. Нужна фанера в идеале 6мм. Я такую не смог найти, но нашёл фанеру 4мм, распиленную квадратами 50х50см. Берём 2 ровных(!) листа. Также понадобится клей ПВА столярный (у меня уже был универсальный, но позже я докупил банку водостойкого). Так же смотрим ручной лобзик и пилки для него.
Если есть какой-то специнструмент для фигурной резки — вообще замечательно. Пилить надо много и долго.
Ищем место для работы, желательно большой стол с хорошим освещением, клеим на ПВА вырезанные детали с одного из чертежей. Зажимаем к столу струбциной фанеру, и начинаем возвратно-поступательные движения лобзиком, и попутно вспоминая алкаша-трудовика в школе.
Делал модель на работе. За одну ночную смену я сделал нос катера.


Небольшой нюанс. Центральная часть, на которую крепятся шпангоуты из 4мм фанеры получилась, на мой взгляд, тонкая. Она легко гнулась, и была кривовата. Приклеиваем ее на фанеру, хорошо прижав по всей площади, даём высохнуть, и вырезаем такую же по форме уже выпиленной. Получаем 8мм толщину. Уже посерьезней.
Приклеиваем шпангоуты, не забыв что пазы на них (в центре) рассчитаны для 6мм фанеры, надо расширить до 8мм.
Следующий этап склейка корпуса вместе. Состыковка происходит в центре. Я взял доску, положил на неё кормовую часть и носовую. Зафиксировал изолентой. Под носовую часть примерно в центре, подложил изоленту, для того чтобы нос был правильно приклеен, а не смотрел вниз.
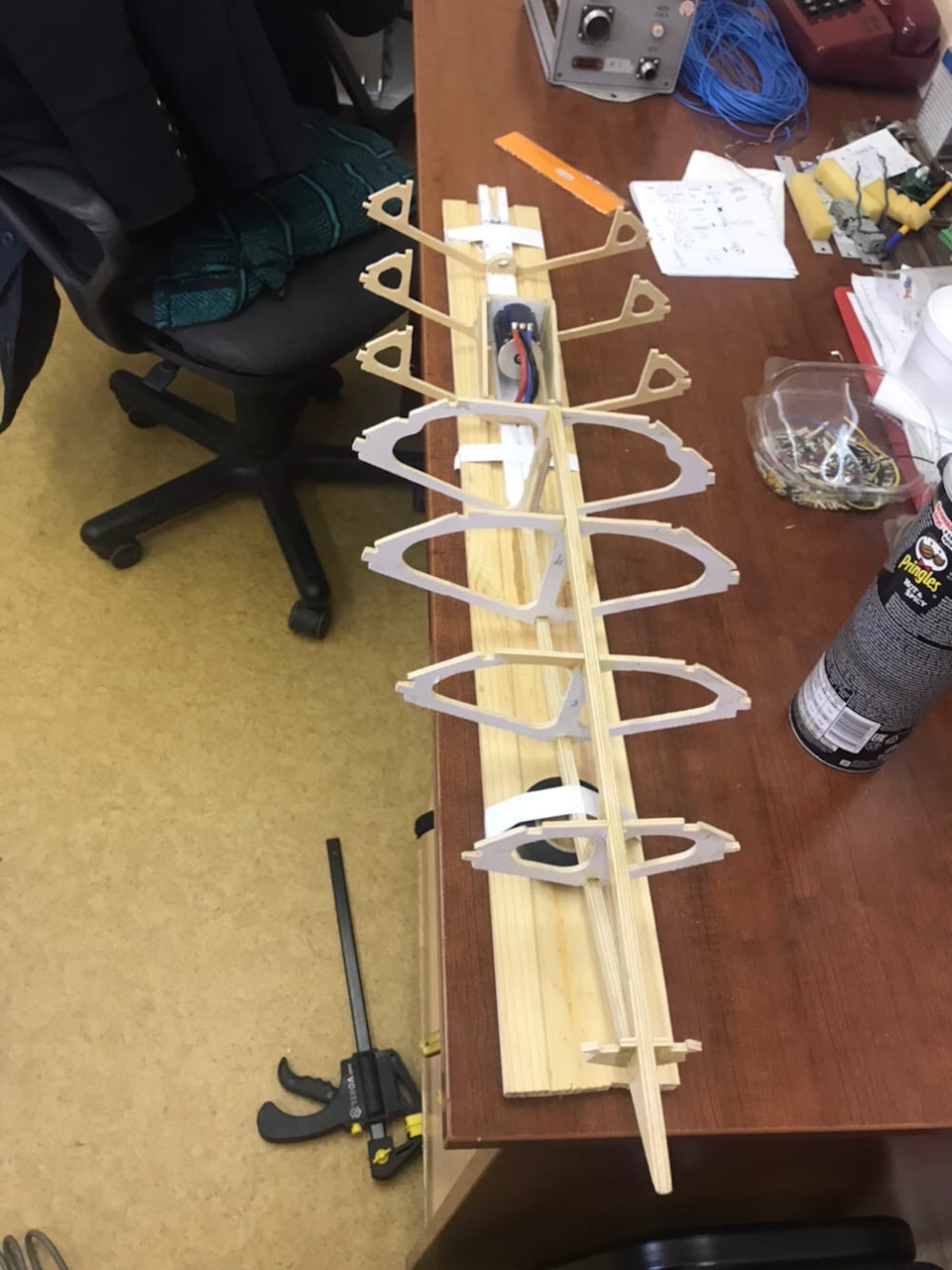
В общем скелет готов. Следующий момент — стрингера(ы) (хз как правильно) — продольные длинные палки, соединяющие шпангоуты вместе. В том же строительном магазине взял штапик 10х10 мм, длиной 150см. По чертежу они должны быть 6х6 мм. Зажимаю в тиски и канцелярским ножом срезаю лишнее. Можно рубанком, но я не стал тратить лишние деньги, а найти его мне негде.
Вклеиваем их начиная с кормы к носу, зажимая их проводом из витой пары. Нос пока не спешим клеить, там много работы, чтоб вывести его красиво.
Делаем радиоуправляемую лодку на плате Arduino Nano

В одном из предыдущих материалов мы поделились обзором видеоролика по изготовлению радиоуправляемой машинки. Продолжим тематику самодельных радиоуправляемых игрушек, представив очередную идею в виде кораблика.
Начнем с просмотра авторского видеоролика
Нам понадобится:
— игрушечный кораблик;
— сервопривод;
— двигатель;
— две платы Arduino Nano;
— две платы радио модуля NRF24L01;
— плата L298N;
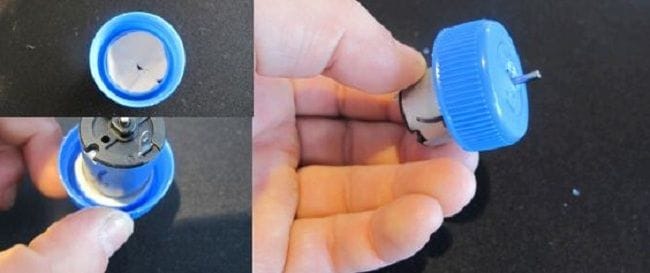
— две крышки от пластиковой бутылки;
— отсеки для пальчиковых батареек.
Сначала в крышках необходимо сделать прорези для лопастей. Делаем прорези в местах, где нет резьбы.
Делаем необходимые отверстие по центру крышек и в кораблике.
Сгибаем проволоку так, как это показано на рисунке ниже.
Просовываем проволоку через отверстие на крышке и фиксируем клеевым пистолетом.
Далее приклеиваем в прорезях куски пластмассы, получив лопасти.
Проделываем то же самое со второй крышкой.
Далее вставляем двигатель в нижнюю часть корпуса игрушечного кораблика, закрепив двумя винтами.
В задней части лодки проделываем отверстие для закрепления сервопривода.
По словам автора идеи, гребные винты лучше всего прикрутить к валу редуктора моторчика с помощью холодной сварки.
Драйвер двигателя прикрепляем к верхней части кораблика двумя винтами.
Коробочки для аккумуляторов спаиваем последовательно и прикрепляем так, чтобы нагрузка распределилась равномерно, поскольку аккумуляторы достаточно тяжелые.
Теперь необходимо запрограммировать обе платы. Как это сделать, вы можете узнать в материале, посвященном изготовлению радиоуправляемой машинки.
Теперь необходимо собрать схему пульта, которую представляем ниже.
Также представляем схему сборки электроники на корабле.
Кораблик, который использует автор, узкий. Для того, чтобы он не переворачивался, он прикрутил по бокам две пластиковые бутылки.
Наконец, поворотную систему кораблика можно сделать из куска пластмассы, который необходимо вырезать по форме лопасти. Эту лопасть нужно зафиксировать на сервоприводе небольшим кусок проволоки. Если вы знакомы с материалом по изготовлению машинки на радиоуправлении, то отметим, что его пульт не подойдет для управления корабликом.
Кораблик готов. По словам автора радиус действия пульта равен 100 метрам.
Лодка на Arduino с датчиками

Этот проект автор основал на более простом варианте самоделки лодки, и усовершенствовал его. В лодку поставлены датчики для избегания препятствий и движения на свет. Как контроллер в лодке используется Arduino, спереди установлен ультразвуковой датчик, а датчики света расположены по бокам. Эта простенькая лодка не врезается в стенки, и управляется фонариком.
Материалы и инструменты:
— Изолента/скотч
— Термопистолет с термоклеем
— Двигатели постоянного тока 2 шт
— Бутылки пластиковые 2 шт
— Провода
— Пропеллеры небольшого размера 2 шт
— Arduino, компьютер и USB кабель
— Коробка пластиковая
— Батарея 9В и разъем
— Диоды мощные (по типу 1N4004)
— Резисторы
— Транзистор MOSFET или TIP 120
— Два фотоэлемента и две кнопки
— Ножницы
— Припой с паяльником

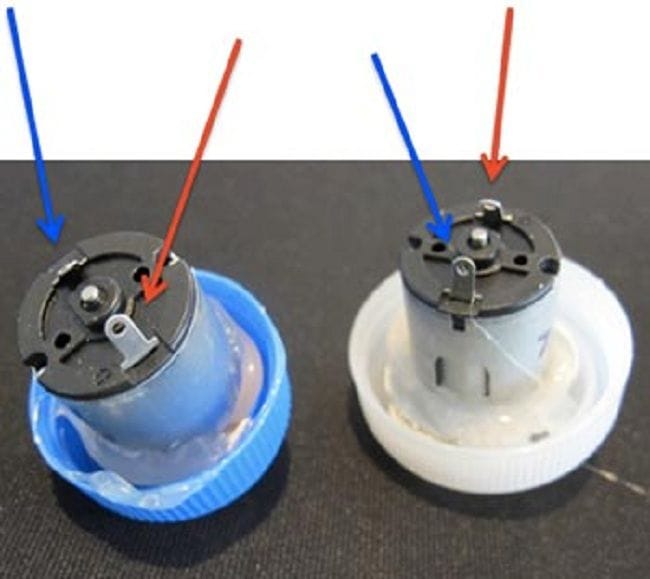
Шаг 1. Установка двигателей.
С бутылок снимают крышки, и в каждой из них делают отверстие. Внутри крышки автор выдавливает термоклей не закрывая отверстия. Вал двигателя он поместил в отверстие и посадил его на клей. После засыхания клея вал свободно вращается. Такая же процедура происходит со второй крышкой.
Шаг 2. Крепление бутылок.
Бутылки скрепили между собой по принципу плота с помощью трёх полос скотча.

Шаг 3. Припайка к двигателям.
Так как двигатели, закреплённые в пробках, не имели проводов, потребовалось их припаять, длину проводов взяли около 25-30 см.
Шаг 4. Разрез в бутылках.
Для того чтобы провода могли попасть в корпус лодки с их верхней стороны делается небольшая щель.

Шаг 5. Закрепление моторов.
Далее, крышки автор закручивает на бутылках, так как закручивались они плохо пришлось использовать горячий клей. Провода просовываются через подготовленные отверстия на бутылках.

Шаг 6. Корпус.
Пластиковая коробка приклеивается к двум бутылкам. В этой ёмкости для электроники можно сделать отверстия для проводов, или же провести провода через заднюю часть коробки. Отверстия для проводов на бутылках изолируются термоклеем.

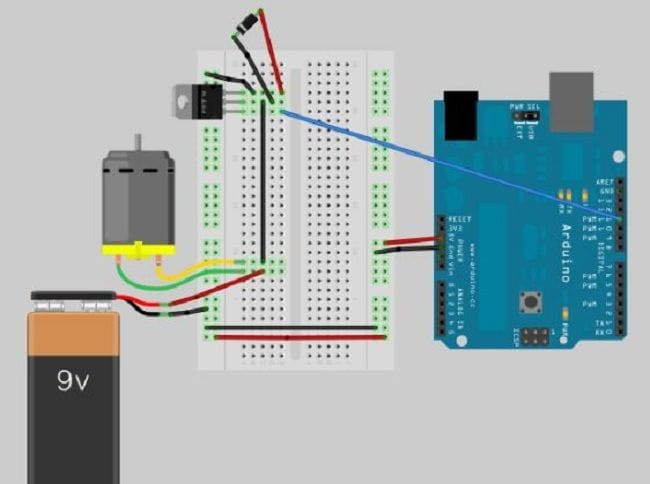
Шаг 7. Электросхема.
В схеме использован транзистор TIP 120 в качестве коммутатора (можно использовать аналогичные транзисторы MOSFET или Дарлингтона). Используется он для коммутации нагрузки при потреблении большого количества тока, так как Arduino не хватает мощности для двигателей. Эта схема собирается для первого, а затем и для второго двигателя (для второго двигателя еще одна батарея не нужна).
Шаг 8. Датчики.
Ультразвуковой датчик отлично подходит для передней части лодки, предупреждает о препятствиях на пути. Фотоэлементы действуют как антенны, и используются чтоб лодка плыла на свет. Кнопки по бокам используются как датчики препятствия. Также можно модифицировать код и использовать другие датчики, например инфракрасные.

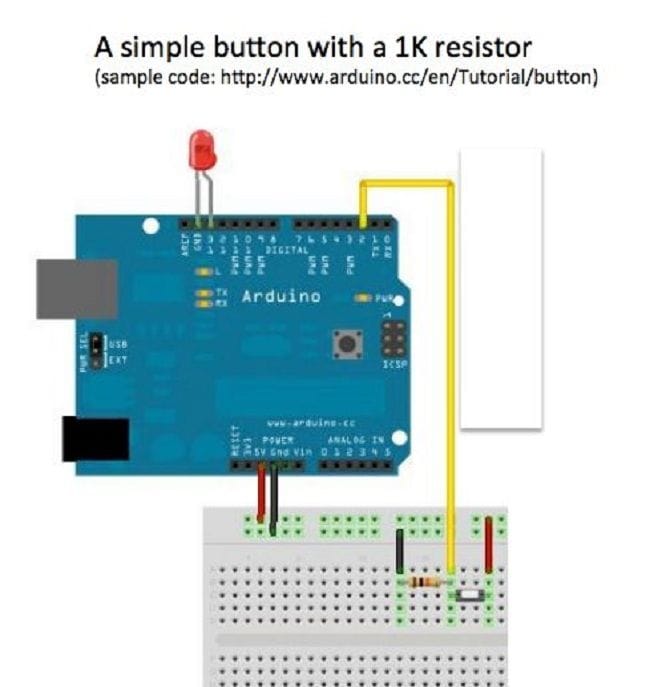
Шаг 9. Схемы для датчиков.
На схеме видно подключение простой кнопки и резистора 1К. Повторяется выполнение схемы для обеих кнопок, кнопки ставят с двух сторон лодки. Они будут отвечать за изменение движения лодки при столкновении.
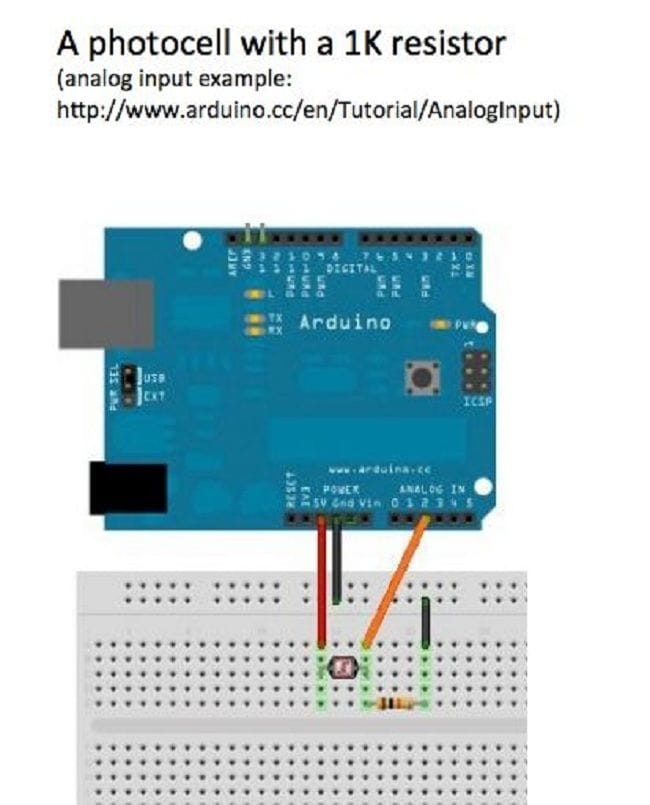
На следующем рисунке показана схема с 1К резистором и фотоэлементом. Автор выполнил её 2 раза и разместил фотоэлементы на разные стороны лодки.
Шаг 11. Сборка лодки.
Собранная схема, Arduino и батареи помещают в коробку.

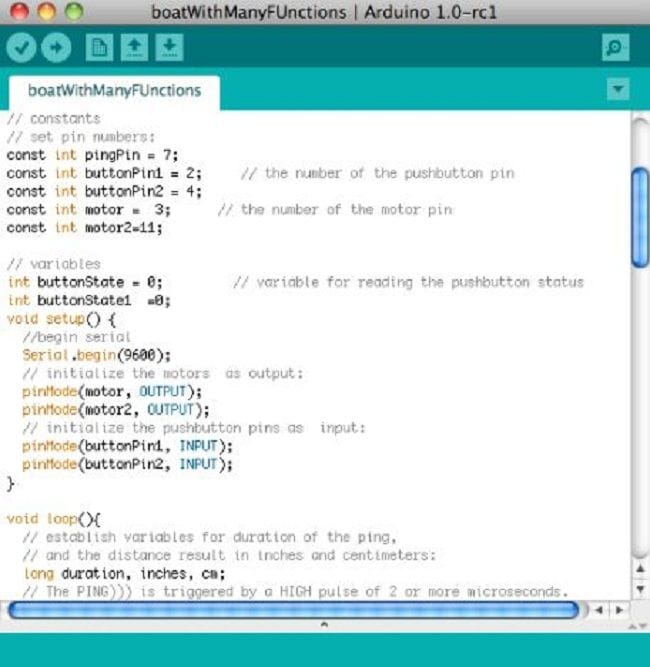
Шаг 12. Загрузка скетча.
Далее, следует открытие Arduino IDE выбор правильного файла и порта, после чего автор скомпилировал и загрузил код в контроллер.



Шаг 13. Водонепроницаемость и тест.
Все потенциальные места попадания воды автор дополнительно изолировал горячим клеем. Также заизолировал все провода от короткого замыкания. Ёмкость с Arduino накрывается такой же коробкой и заклеивается изолентой. К моторам крепят пропеллеры. Вот лодка и готова, теперь можно приступать к испытаниям на воде.

Читайте также: