Заход на посадку по арк
Всего существует 11 видов захода: они подразделяются на визуальные, инструментальные, точные и неточные.
I. Визуальные:
1. заход визуальный (продолжение захода на посадку по приборам, когда часть схемы или вся схема захода на посадку по приборам не завершена и заход осуществляется при визуальном контакте с ВПП, и (или) с её ориентирами)
2. заход на посадку по ПВП (этап визуального полёта, выполняемый с соблюдением правил ПВП и при установленных минимумах ПВП)
Различие этих двух заходов в том, что ВЗП выполняется по установленной схеме, а ПВП – без схемы. Как правило ВЗП выполняется так: с эшелона перехода борт курсом на ближний привод снижается до минимальной безопасной высоты (МБВ), на этой высоте он входит в зону визуального маневрирования (ЗВМ) и оттуда уже летит визуально. При этом в поле зрения экипажа воздушного судна (ЭВС) ВПП должна быть постоянно после входа в ЗВМ. При заходе ВЗП и ПВП после связи с кругом воздушное судно передают сразу СТАРТУ, а не ПОСАДКЕ. О готовности к посадке при ВЗП борт должен доложить на 3-ем развороте (при довороте на посадочный, потому как 3-его как такового там нету). При ПВП же схема вообще отсутствует.
II. Инструментальные:
1) заход автоматический (заход на посадку по РМС в автоматическом режиме)
2) заход директорный (заход на посадку по РМС в директорном режиме)
3) заход по маякам (заход на посадку по РМС в режиме ПСП)
Три перечисленных захода объединяет то, что в основу положена курсоглиссадная система (ILS – Instrumental Landing System, что соответствует российской РМС – Радиомаячная система посадки).
При заходе по маякам мы знаем положение самолёта относительно посадочной прямой (левее-правее, ниже-выше). При этом стрелки на приборе просто показывают положение ВС. Зная где мы находимся, можем корректировать направление полёта, скорость снижения, чтобы оставаться на посадочной прямой.
При директорном заходе на приборе ещё есть планки, которые показывают, КУДА нужно лететь, чтобы оставаться на посадочной прямой. Причём директорные планки показывают, какой нужно дать крен и насколько изменить тангаж, чтобы оказаться на глиссаде. При полном штиле при заходе по маякам и директорам разницу по курсу мы не заметим, а вот при боковом ветре директорные планки сразу покажут с каким упреждением к курсу лететь. Разница между автоматическим заходом и директорным заключается в том, что по тем же самым директорным планкам самолёт ведёт не пилот, а автоматика. По последним документам ИКАО БПРМ и ДПРМ необязательны при выполнении захода по РМС (ILS) в любом режиме (автоматическом, директорном, ПСП).

4) заход по локатору (заход на посадку по РСП)
5) заход по локатору, контроль по приводным (заход на посадку по РСП+ОСП)
То же самое, что и заход по локатору с той только разницей, что ЭВС контролирует положение ВС по ДПРМ и БПРМ.
1) заход по приводным (заход на посадку по ОСП)
2) заход по приводным, контроль по обзорному (заход на посадку по ОСП с использованием ОРЛ-А)
Тоже самое, что заход по приводным с той только разницей, что диспетчер контролирует положение ВС по ОРЛ-А (обзорный радиолокатор аэродромный). Радиолокатор напоминает АСРЦ – диспетчер видит метку сверху, но не видит сбоку (не может контролировать снижение).
3) заход по ОПРС (заход на посадку по отдельной приводной радиостанции)
Заход на посадку осуществляется при помощи только одной отдельной приводной радиостанции БПРМ. Вы имеете точку ОПРС и курс, с которым вы должны к ней подойти. Использую эти данные, выходите на посадочный курс. Снижение выполняется почти также, как при заходе по приводным, за исключением того, что там нет ДПРМ. Т.е. от самой ТВГ производится снижение с расчётной вертикальной. Доклад о готовности к посадке аналогичен заходу по приводным.
Заход на посадку осуществляется при помощи использования угломерно-дальномерного оборудования. Положение ВС относительно ВПП определяется по ВОР с ДМЕ. Мы знаем направление на него и удаление от него. Кроме того, мы можем задать курс, с которым нам нужно к нему подойти. Используя всю эту информацию, выводим ВС на посадочную прямую.
Что входит в перечень работ по подготовке дома к зиме: При подготовке дома к зиме проводят следующие мероприятия.
Тест Тулуз-Пьерон (корректурная проба): получение информации о более общих характеристиках работоспособности, таких как.
Для выполнения захода на посадку с использованием АРК необходимо нажать кнопку АРК и установить на ПНП курс посадки. Для захода и расчета на посадку с использованием АРК, применяются следующие методы:
с расчетного рубежа;
двумя разворотами на 180°.
Заход и расчет на посадку с прямой.
На высоте заданного эшелона выйти на ДПРМ.
Момент пролета ДПРМ определяется по изменению показания стрелки АРК с 0° на 180° (по срабатыванию на самолёте световой и звуковой сигнализации МРП (на высотах менее 2000 м)). При пролете ДПРМ включить секундомер, довернуть самолёт на заданный курс (угол отворота), установить скорость 500-600 км/ч и следовать в течение расчетного времени.
По истечении расчетного времени полета от ДПРМ с заданным курсом выполнить разворот на посадочный курс с креном 30°. В процессе разворота потерять 200-300 м высоты и изменением величины крена добиться точного выхода на посадочный курс.
После выхода на посадочный курс на высоте не более 4000 м установить скорость не более 500 км/ч, выпустить шасси.
Высота полета, м
Дальность до ВПП, км
На удалении 20-18 км (на высоте 600 м) выпустить закрылки.
С высоты 400-300 м плавно уменьшать скорость с таким расчетом, чтобы на высоте 200 м (момент пролета ДПРМ) установить скорость 340-320 км/ч. В дальнейшем действовать так же, как при заходе на посадку в режиме ВОЗВРАТ (ПОВТОРНЫЙ ЗАХОД).
Заход и расчет на посадку с расчетного рубежа.
После выполнения задания с курсом, заданным с КП, следовать на рубеж начала снижения на скорости 500-600 км/ч (или заданной КП).
В момент выхода на расчетный рубеж по команде с КП довернуть самолёт на заданный курс и перевести его на снижение с установленным (заданным) режимом. В процессе снижения по командам с КП своевременно вносить поправки в курс следования и вертикальную скорость снижения.
Направление снижения (курс) дается с таким расчетом, чтобы самолёт вышел в точку разворота на посадочный курс на высоте 2000 м (или другой высоте, установленной для данного аэродрома). Режим снижения устанавливает расчет КП.
На высоте 2000 м перевести самолёт в горизонтальный полет и затем с креном 30° выполнить разворот (доворот) на посадочный курс.
В процессе разворота изменением величины крена добиться точного выхода на посадочный курс. Точность захода контролировать по командам с земли и запросам радиопеленгатора. На посадочном курсе установить скорость не более 500 км/ч, и на высоте менее 4000 м, выпустить шасси, на удалении 20-18 км (на высоте 600 м) выпустить закрылки, установить скорость 340-320 км/ч и перевести самолёт на снижение. Снижение до посадки производить так же, как и при заходе в расчете на посадку с прямой.

суббота, 18 июня 2016 г.
Заход на посадку по ОСП
На аэродромах, где отсутствует радиолокационный контроль за заходом на посадку, момент начала снижения рассчитывается экипажем. При этом имеют место ошибки в расчете, в основном связанные с неучетом изменения скорости и направления ветра в процессе построения предпосадочного маневра.
Для того чтобы избежать отклонения по высоте пролета дальнего привода и необходимости изменять вертикальную скорость по сравнению с расчетной после пролета его, а также добиться снижения самолета по установленной глиссаде после пролета ДПРМ с расчетной вертикальной скоростью (что способствует безопасной посадке), рекомендуется производить полет на предпосадочной прямой по уточненной методике захода на посадку. Она заключается в следующем.
1. Перед началом снижения рассчитать вертикальную скорость снижения Vв.расч., необходимую для снижения по расчетной глиссаде, в соответствии с установленным углом наклона глиссады.
2. По истечении времени tгпвыпустить закрылки на 35° и перевести самолет на снижение с вертикальной скоростью:
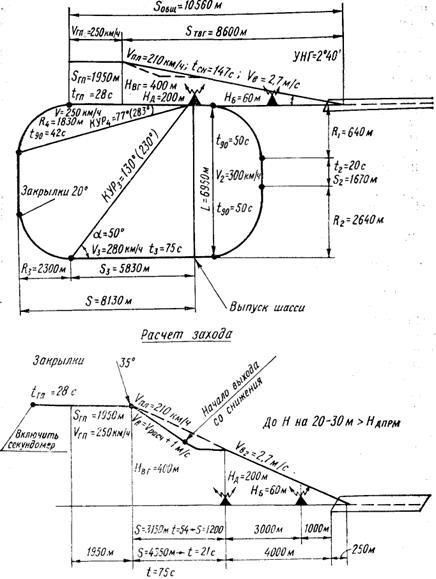
3. Когда высота полета будет на 20—30 м больше установленной для пролета над ДПРМ и если к этому времени не пройден ДПРМ, необходимо установить двигатели на режим работы, обеспечивающий сохранение поступательной скорости в горизонтальном полете, и перевести самолет в горизонтальный полет, выдерживая высоту пролета ДПРМ.
4. После пролета ДПРМ снижение необходимо выполнять по расчетной глиссаде до высоты принятия решения, не допуская отклонения вертикальной скорости от расчетной.
ПРЕДУПРЕЖДЕНИЕ. Во всех случаях полета вне видимости наземных ориентиров запрещается снижение при сигналах радиовысотомера о минимальном запасе высоты над препятствием. При срабатывании сигнализации немедленно перевести самолет в режим набора высоты до прекращения сигналов.
По достижении расчетного КУР4 (при заданном магнитном курсе) пилот производит ввод самолета в разворот, при этом взгляд сосредоточивается на авиагоризонте и вариометре;
— внимание уделяется авиагоризонту и вариометру для создания крена 15° и выполнения разворота в горизонтальной плоскости без скольжения;
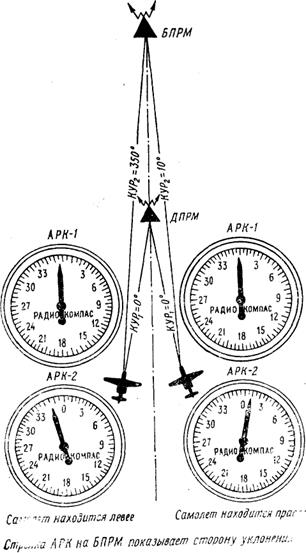
— точность выхода из разворота в створ ВПП достигается контролем в двух точках (см. рис. 65): МК1 = ПК±60° и МК2 = ПК±30°, для чего в процессе выхода на указанные курсы взгляд переносится на показания КУР, сопоставляются их значения и вносится поправка в крен. В промежутке между указанными точками пилот должен следить за показаниями авиагоризонта, вариометра, скоростью, координацией. За 30° до вывода самолета на посадочный курс производится постоянное сопоставление значений курса и КУР. Вывод выполняется по авиагоризонту и КППМС на МКпос — (±УС);
Из сказанного следует, что на всех этапах захода на посадку основным прибором является авиагоризонт; точность пилотирования по приборам при заходе на посадку зависит от того, насколько правильно пилот выбирает приборы, необходимые для данного этапа полета, в установленной последовательности распределяет движение взгляда по ним и не распыляет внимания на другие приборы.

Заход по КГС в режиме СП является основным и применяется в случае захода на посадку в сложных метеоусловиях, а также для тренировки и проверки летного состава.
Курсоглиссадные системы (СП-50, СП-50М, СП-68, СП-70, ИЛС) обеспечивают экипаж непрерывной информацией о положении воздушного судна относительно линии курса и глиссады снижения.
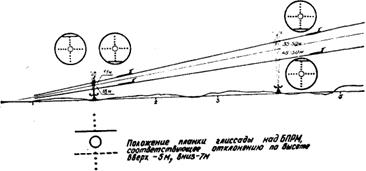
Об отклонениях воздушного судна от заданной траектории полета можно судить по положению планок курса и глиссады на указателе положения прибора КППМС.
Точность захода на посадку по КГС в режиме СП зависит от умения пилота рационально распределять свое внимание на основные пилотажные (авиагоризонт, вариометр) и контролирующие приборы (указатели положения, скорости и др.), от умения быстро формировать образ полета и принимать правильные решения, от навыков в исправлении курса на 2—3° и вертикальной скорости в пределах 0,5—1 м/с.
Начало четвертого разворота определяется по предвычисленному магнитному пеленгу ДПРМ, в зависимости от удаления до ВПП, скорости полета и боковой составляющей ветра на высоте круга.
— под углом 30° к оси ВПП с помощью планки курса указателя положения самолета относительно равносигнальной зоны. В этой точке должно наступить отшкаливание планки курса; если этого не произойдет, вывести самолет из крена и ждать ее отшкаливания. В случае преждевременного отшкаливания планки курса, что свидетельствует о позднем вводе в разворот, увеличить крен до 20°. Последнюю треть разворота выполнять при непрерывном сопоставлении значений курса с движением планки указателя положения относительно равносигнальной зоны, которая в момент вывода должна занять нейтральное положение. Курс полета при этом должен быть равен посадочному с учетом угла сноса.
В случае значительного отклонения от ЛЗП (курсовая планка отклонена до упора) развернуть воздушное судно в сторону отклонения планки курса на величину угла выхода (20—30°), который берется с учетом боковой составляющей ветра.
Выход в створ ВПП осуществлять методом полета с постоянным КУР (постепенно уменьшать угол выхода или осуществлять полет с постоянным креном 2—3°) с последующей корректировкой доворота на посадочный курс по курсовой планке.
В случае отклонения планки курса в пределах шкалы прибора развернуть самолет в сторону ее отклонения настолько, чтобы планка курса приобрела заметное движение к центру прибора. При приближении планки к центру прибора постепенно уменьшать угол упреждения с таким расчетом, чтобы планка замедлила движение к моменту подхода к черному кружку шкалы прибора и остановилась.
При небольших отклонениях самолета, что определяется по заметному движению планки курса от центра прибора, остановить движение планки внесением поправки в курс 2—3° в сторону отклонения планки. Для выполнения доворота на 2—3° достаточно с помощью штурвала ввести самолет в крен 2—3° и вывести изнего.
Выдерживание глиссады обеспечивается сохранением постоянного, подобранного по вариометру для расчетной вертикальной скорости угла тангажа. Для балансировки самолета используется отклонение стабилизатора. Если самолет сбалансирован правильно (как по тангажу, так и по крену), значительно облегчается выдерживание заданной глиссады снижения. При полете в зоне курса и глиссады основными приборами выдерживания режима снижения являются авиагоризонт и вариометр, а указатели скорости, высоты, курса, радиокомпаса и положения воздушного судна на КППМС — приборами контроля.
Согласно существующим нормативам точность планирования в зоне курса и глиссады над ДПРМ и БПРМ оценивается следующим образом (рис. 72, 73).
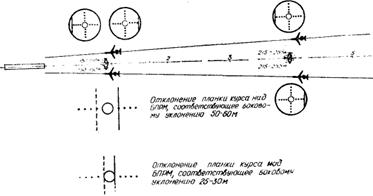
Пролет ДПРМ определять по сигналам маркерного приемника и по изменению КУР на 90°. При пролете контролировать соответствие высоты полета над ДПРМ высоте, установленной по схеме захода на посадку.
По мере приближения к ВПП равносигнальные зоны курса и рассады сужаются, планки указателя положения самолета относительно равносигнальной зоны все более точно реагируют на отклонения самолета, сказываются изменения направления и скорости ветра. Все это требует от пилотов повышенного внимания, четких и соразмерных действий рулями для внесения в курс поправок величиной 2—3° и для исправления вертикальной скорости в пределах ± 0,5 м/с.
На аэродромах, оборудованных курсоглиссадными системами, основным режимом захода на посадку является директорный.
Пилотирование самолета при заходе в директорном режиме осуществляется вручную по директорным стрелкам.
Директорный прибор избавляет пилота от переработки и обобщения информации, получаемой от многих приборов, позволяет с большой точностью выдерживать глиссаду снижения и курс полета.
Характерно, что при заходе на посадку в директорном режиме основные пилотажные приборы (авиагоризонт и вариометр) превращаются в приборы контроля или вспомогательные, показания которых для пилотирующего становятся как бы второстепенными. Они служат только для взаимного контроля правильности показаний. Однако для обеспечения безопасности полета контроль показаний этих и других пилотажно-навигационных приборов должен быть активным и полноценным. Если один из пилотов осуществляет пилотирование по директорным стрелкам (активное управление), другой должен уделять повышенное внимание показаниям остальных приборов (контролирующее управление). Сличение и анализ показаний авиагоризонтов при этом обязательны.
Начало четвертого разворота при заходе в директорией режиме определяется по предвычисленному магнитному пеленгу ДПРМ в зависимости от удаления от ВПП, скорости полета и боковой составляющей ветра на высоте круга.
Убедиться, что вертикальная командная стрелка на приборе КПП отклонена в сторону разворота, и ввести самолет в крен. Вертикальная командная стрелка при этом приближается к центральному кружку прибора. Изменяя величину крена, удерживать командную стрелку в середине центрального кружка. Крен при этом не должен превышать 20°. Допускаются колебания командной стрелки в пределах центрального кружка прибора, но длительное отклонение ее от центра даже на небольшую величину повлечет за собой ошибку при выводе самолета в равносигнальную зону курса.
Во время четвертого разворота дополнительно контролировать точность выхода самолета в створ ВПП: под углом 60° к оси ВПП, сравнивая МПР и ЗМПУ, а под углом 30° — по отшкаливанию планки курса на КПП.
Если четвертый разворот выполняется не на расчетном удалении от начала ВПП, вывести самолет в створ ВПП по прибору КПП и по командам диспетчера.
На предпосадочной прямой до входа в глиссаду выпустить закрылки на 35° и фары (при необходимости). В момент прохождения планки глиссады по КПП через центр прибора при одновременном отклонении командной стрелки тангажа перевести самолет на снижение, удерживая стрелку тангажа в нейтральном положении.
Для обеспечения лучшего качества стабилизации самолета на глиссаде выдерживать заданную скорость с точностью ± 10 5км/ч.
При полете над ДПРМ определить возможность продолжения директорного захода на посадку, для чего необходимо убедиться в следующем:
— самолет отклонился от заданной траектории по курсу и глиссаде по прибору КПП не более чем на одну точку;
— крены самолета, необходимые для удержания командной стрелки в нулевом положении, не превышают 5—8° — при полете в равносигнальной зоне курса.
После пролета ДПРМ продолжать полет до ВПР, учитывая уменьшение линейной ширины зон курса и глиссады, удерживать командные стрелки в пределах центрального кружка небольшими плавными отклонениями рулей. При пролете БПРМ. определяется возможность продолжения директорного захода (высота пролета БПРМ соответствует установленной, отклонения по курсу в пределах белого кружка, по глиссаде — одна точка вниз по прибору КПП).
Заход на посадку можно условно разделить на четыре этапа:
подход по схеме аэродрома (до момента входа в глиссаду)
собственно заход на посадку (от входа в глиссаду до пересечения входной кромки ВПП)
приземление, или собственно посадка (от пересечения кромки ВПП до уверенного касания)
пробег (от касания до полной остановки)
Подход по установленной схеме
После снижения с эшелона, самолет встраивается в схему посадки, снижаясь до высоты круга. На карте представлена такая типичная схема подхода для ВПП15 (взлетно-посадочная полоса 15) аэропорта Курумоч (Самара).

Соответственно различают заходы
от третьего (разворота)
от траверза ДПРМ
Траверз (от лат. traversus — поперечный) — направление перпендикулярное продольной оси воздушного судна. При пролете траверза ДПРМ, он будет точно слева или справа. О том, что такое ДПРМ см ниже.
Глиссада (от фр. glissade — скольжение) — прямолинейная траектория (или точнее плоскость) снижения летательного аппарата на конечном этапе захода на посадку.
РСБН — радиотехническая система ближней навигации. Имеет дальномерный и азимутальный канал, и функционально аналогична комплексу VOR-DME.
Угол наклона глиссады (УНГ)
Нормальный угол залегания глиссады принят равным 2 град 40 мин, т.е. обычно глиссада лежит достаточно полого. УНГ выбирается с учетом расположения препятствий по курсу захода, поэтому для горной местности высота круга, и соответственно УНГ может быть больше — до 4 град.
Вертикальная скорость снижения по глиссаде должна быть практически постоянна. Она зависит только от УНГ, поступательной скорости самолета и определяется по формуле
где a — угол залегания глиссады
Следовательно, при средней поступательной скорости захода реактивного самолета 270 км/ч (150 kts), мы получим
для УНГ= 2,7 град, Vy=3.5 м/c
для УНГ= 4 град, Vy=5.2 м/c
Отсюда следует запомнить, что для стандартной глиссады скорость снижения должна составлять примерно 3-4 м/c и почти никогда не должна превышать 6 м/c
Заход по прямоугольному маршруту
Предположим, что мы вписываемся в круг в районе траверза ВПП. В этом случае при заходе в штурвальном (директорном) режиме действия экипажа Ту-154 будут иметь следующий вид (для других ВС схема будет достаточно сходная, отличаться будет, главным образом, скорость, и углы выпуска механизации):
полет на высоте круга
Самолет перешел в горизонтальный полет на высоте круга. На скорости 400 км/ч КВС (командир воздушного судна) устанавливает задатчик стабилизатора в положение соответствующее центровке (но сам стабилизатор еще не перекладывается). По решению и команде КВС, 2П (второй пилот), подготавливает и включает автомат тяги для автоматического управления двигателями.
полет от траверза ДПРМ
третий разворот
Угол крена 15-25 град. Скорость 360-370 км/ч. Момент начала третьего разворота определяется по команде диспетчера, по положению стрелки АРК, по показаниям НВУ (навигационно-вычислительное устройство) или строго по расчетному времени полета от траверза ДПРМ. После катастрофы в Иркутске МАК рекомендовал входить в третий разворот с закрылками уже выпущенными на 15 град, не знаю правда, что это изменит, пить-то все равно надо меньше. Короче, по классической схеме выпуск закрылков осуществляется только после третьего разворота.
полет от третьего до четвертого разворота
После выхода из разворота КВС подает команду: "Cкорость 340-360. Закрылки 28". 2П (второй пилот) задает на УС-И скорость 340 км/ч и переводит рукоятку закрылков в положение "28 град", при этом также автоматически выпускаются предкрылки (на 22 град) и стабилизатор устанавливается в согласованное положение (0, -3 или -5.5). Штурман контролирует выпуск механизации и докладывает "Закрылки выпускаются синхронно, стабилизатор перекладывается на кабрирование, предкрылки выпускаются", а после выпуска механизации — "Механизация выпущена".
Далее, в зависимости от конкретной схемы заходы, например, если высота круга большая приступают к планированию с небольшой вертикальной скоростью (1-3 м/c), либо продолжают выдерживать высоту круга. При подходе к четвертому развороту для поддержания скорости 300-320 км/ч при пилотировании в штурвальном режиме нужно немного увеличить режим двигателей.
четвертый разворот
Четвертый разворот обычно располагается на расстоянии порядка 12-16 км от ВПП. Начало выполнения разворота определяется по команде диспетчера или по положению стрелки АРК — обычно за 10-15 град до прохождения створа полосы (см по схеме). Чтобы вписаться в створ, разворот должен выполняться очень точно и аккуратно. Угол крена 15-20 град.
на предпосадочной прямой
После выхода из 4-го разворота на скорости не более 300 км/ч КВС дает команду "Закрылки 45", после чего 2П выпускает закрылки полностью, при этом стабилизатор автоматически перекладывается на максимальный угол (=предкрылки уже выпущены полностью на 22 град). По команде КВС, штурман проводит контроль по карте (раздел "Перед входом в глиссаду"). Ночью штурман также выпускает фары.
Самолет теперь находится в горизонтальном полете по предпосадочной прямой пока еще ниже плоскости глиссады на расстоянии 2-3 км от ТВГ. Если до входа в глиссаду средства механизации не выпущены в посадочное положение, то дальнейшее снижение и заход на посадку запрещаются.
вход в глиссаду
Отметим, что в англоязычных странах круг полетов измеряется не разворотами как у нас, а "ногами", т.е. отрезками между разворотами. Соответственно различаются,
upwind leg — "нога против ветра", отрезок между 4-м и 1-м разворотом
crosswind leg — "нога поперек ветра", между 1-м и 2-м
downwind leg — "нога по ветру", между 2-м и 3-м
base leg — "основание", между 3-м и 4-м
final "файнэл"— предпосадочная прямая
procedure turn "прэсиджэr тёrн"— разворот (по схеме)
Заход с прямой
При заходе с прямой, например, от ОПРС Кошки, выполняется только относительно небольшой доворот для вписывания в предпосадочную прямую. При этом экипажем выполняются те же операции, но привязка идет не к положению разворотов, а к расстоянию до ВПП:
22-25 км до ВПП — выпуск шасси (в снижении)
12-16 км — переход в горизонтальный полет и полный выпуск закрылков
Заход на посадку на различных типах ВС
В случае других типов ВС предпосадочное маневрирование и заход выполняются сходным образом, в основном, различаются только массы, скорости и углы выпуска механизации.
В таблице собраны данные для некоторых самолетов отечественного производства. Обратите внимание, что скорости различаются не очень сильно, несмотря на значительное различие в массах.

Данные приведены, в основном, для больших посадочных масс. Для меньших масс, скорости будут соответственно на 5. 15 км/ч меньше.
Кроме прочности шасси, посадочная масса ограничена большой посадочной скоростью и возможностью обеспечения нормального градиента набора высоты с одним отключенным двигателем в случае ухода на второй круг.
Посадка с максимальной взлетной массой (98 т для Ту-154Б, 100 т для Ту-154М) возможна только, если КВС забыл выключить дома самогонный аппарат, поцеловать тещу, покормить аквариумных рыбок, короче в каких-то очень экстренных ситуациях типа пожара на борту. При такой посадке скорость на глиссаде должна быть не менее 315 км/ч при закрылках выпущенных на 28 град. В других случаях посадочная масса уменьшается выработкой топлива.
Настройка частоты ILS
Прожуйте скорее ваш бутерброд, мы приступаем к заходу на посадку.
Перед заходом прежде всего убедитесь, что правильно выставлена радиочастота системы ILS и магнитный курс посадки (МКпос)
Например, мы летим из Франции, садимся в Шереметьево и нам нужна “Шереметьево RNW 06R” (рануэй зироу-сыкс райт), по-русски говоря, “ВПП 06 правая.”
Посадочный курс для нее составляет 67 градусов, частота ILS 108.10. Если заходить с противоположной стороны, то, как нетрудно догадаться, та же полоса будет иметь обратный курс посадки 67 + 180 = 247 град и номер 25L. Частота ILS будет уже другая.
По нормам ICAO номер полосы должен выбираться в соответствии со значением магнитного курса посадки. Например, для курсов 15. 24 град номер должен быть 02 и т.д. Почему же тогда полоса в Шереметьево в реальности обозначается 06, а не 07? Не все полосы пронумерованы точно. Возможно, это связано с постепенным изменением магнитного склонения и первоначальными погрешностями в измерении магнитного курса.
Точное расстояние можно определить по указанииям системы DME (Distanсe Measuring Equipment, дальномерное оборудование), индикаторы которой обычно расположены прямо перед глазами пилота, например, в случае Ту-154 на ПНП-1 (планово-навигационный прибор, или проще говоря, указатель курса).
Работа самолетных радиодальномеров основана на радиолокационном методе определения дальности. DME это вражеский стандарат, у нас используются свои дальномерные системы СД-67, СД-75 и пр.
Если ILS настроена правильно, то DME будет показывать расстояние до полосы в километрах или в морских милях (в симе: в зависимости от выбора системы мер в меню, либо от самого прибора).
Отметим, что сокращения типа ILS, VOR, DME на русский не переводятся— в советских изданиях иногда даже пишут русскими буквами ИЛС, ВОР, ДМЕ. Однако у нас существуют функционально аналогичные системы — например, СП (система посадки), РСБН (радиотехническая система ближней навигации, по смыслу соответствует VOR +DME) и т.д. В частности, пилотажно-навигационный комплекс Ту-154 раздельно предусматривает работу как с отечественными, так и западными системами.

Читайте также: