Как сделать сустав для робота
Добавил пользователь Евгений Кузнецов Обновлено: 09.10.2024
Советы начинающим робототехникам от команды стартапа Rozum Robotics — как избежать основных ошибок и какие этапы нужно пройти перед тем, как вывести на рынок успешный продукт.
В этом году нашему стартапу Rozum Robotics исполняется два года. За это время мы успели создать собственного коллаборативного робота. Хотим дать несколько советов начинающим робототехническим и просто хардверным стартапам.
Главное правило, без которого все последующие шаги теряют смысл: вы должны грезить робототехникой. Думать, мечтать и хотеть изменить мир. Без этой тяги всё остальное неважно.
Вам придётся столкнуться с большим количеством вызовов и задач. Без вдохновения слишком велик риск того, что вы свернёте на середине пути.
Я уже раскрыл главный секрет. Так что на этом можно было бы и закончить. Но, если вы хотите большего, поехали.
Перед тем, как браться за разработку проекта, стоит определить, что конкретно нужно рынку. По статистике 42% всех стартапов терпят фиаско именно из-за того, что делают продукт, который никому не нужен.
Рынок робототехники огромен, здесь: промышленные роботы, разные беспилотники, сервисные роботы и роботы для дома. Кстати, инсайт: актуальный тренд и повышенный спрос сейчас наблюдается на секс-роботов.
Когда задача выбора ниши стояла перед нами, мы обратили внимание на зарождающийся рынок коллаборативных роботов. Это роботы, которые в отличие от промышленных (больших и тяжёлых) могут работать в непосредственном контакте с человеком и при этом быть абсолютно безопасным.
Мы провели огромную аналитическую работу, исследовав целый пласт информации: уровень спроса, потенциальные потребители, стоимость покупки и обслуживания, конкурентный анализ и прочее.
Ниша казалась перспективной (так и есть) — аналитики предсказывали более чем стократный рост рынка в течение следующих десяти лет. Новые коботы были в разы дешевле, чем их промышленные собратья. Новые алгоритмы и достижения в проектировании интерфейсов программ делали возможным программирование робота непрофессионалами.
Плюс небольшое на тот момент количество конкурентов. Сейчас входить в эту тематику уже не так интересно: каждый год в мире появляются три-четыре новых сильных производителя. Но тогда сомнений у нас уже не оставалось: мы твёрдо решили сделать своего кобота.
Кадры решают всё. Подобрать людей с нужными компетенциями — это первоочерёдная задача, которую нужно решать. Белоруссия, к сожалению, это не Германия и не США, уровень развития робототехники здесь существенно ниже, чем в перечисленных странах.
Поэтому будьте готовы к тому, что вакансии, размещённые на HeadHunter или других схожих сайтах, не закроют и десятой доли ваших потребностей.
Мы решали эту задачу разными способами. Во-первых, обратили своё внимание на различные конференции и робототехнические состязания. Такие площадки могут быть хорошим источником молодых специалистов с горящими глазами и знаниями по теме.
Но будьте готовы к тому, что этих людей придётся учить. Учить и учиться — это то, что придётся делать постоянно. Нам до сих пор приходится проглатывать по три-четыре книги в месяц просто для того, чтобы поддерживать свой профессиональный уровень. У нас даже появилась специализированная библиотека по робототехнике. Так что, если кому-то актуально, можете оформить абонемент к нам.
Каждый год эти кафедры выпускают больше сотни специалистов в области робототехники. К сожалению, в этой сотне меньше десятка тех ребят, кто достаточно мотивирован и имеет достаточно знаний, чтобы начать заниматься робототехникой на профессиональном уровне.
Проблема кадров, если быть откровенным, не решена у нас в полном объёме до сих пор. К нам каждую неделю приходят на собеседование соискатели. Если вы читаете этот материал, и вам интересно развиваться в робототехнике, — пишите в комментариях. Возможно, мы сможем вам что-нибудь предложить.
До начала разработки вы должны чётко понять: какие компоненты и где будете брать. На самом деле есть три варианта действий:
- сделать всё самим;
- купить всё за большие деньги;
- купить всё за небольшие деньги.
Для третьего варианта достаточно зайти на AliExpress: там вы найдёте много дешёвых моторов. Радуетесь — заказываете. Получаете — огорчаетесь. Реальные испытания показывают, что эти моторы никуда не годятся, и всё разваливается на пятой минуте эксплуатации.
Гуглите ещё. Находите топовых производителей. Радуетесь. Связываетесь. Вас переадресуют на дилера. Дилер называет сумму. Вы огорчаетесь, но что делать? Надо же пробовать. Заказываете. Огорчаетесь ещё больше.
У вас штучная партия: поэтому, помимо завышенной цены, вам нужно ждать в очереди три-шесть месяцев. А тут ещё выясняется, что размер у детали не тот. А кастомизация стоит столько, что вы начинаете думать, что ослышались или ошиблись в нулях.
В общем, мы прошли все три пути и в итоге сделали собственные бескорпусные двигатели и сервомоторы. Причём сделали их действительно хорошими.
Мы презентовали наши разработки в Европе и США. В итоге то, что мы создавали в качестве компонента для робота, превратилось в самостоятельный продукт, а продажи моторов стартовали раньше продажи коботов.
Думаю, если бы мы нашли такой условный rozum robotics, который был бы готов продать нам сервомоторы для нашего робота по приемлемой цене в разумные сроки, мы бы не стали ничего изобретать.
А так — индустрия получила конкурента. Со своей стороны мы готовы поддерживать молодые стартапы и делиться своими технологиями. Просто опишите ваш проект в комментариях.
Запомните: чем раньше вы пойдёте к потенциальным клиентам, тем лучше. Продемонстрируйте MVP как можно большему количеству людей. Любая обратная связь полезна. Ваш замыленный глаз может не видеть проблему.
Большинство людей воспринимают рутину как данность в любой сфере (в быту, в работе). Условно: люди знают, что машине нужна коробка передач. Если опросить водителей автомобилей, вам скажут, что они хотели бы более динамичную коробку, большее или меньшее количество передач, коробку-автомат, вариатор или спортивный режим.
Но почти никто не скажет, что они хотят машину без коробки передач. Понимаете? Мы мыслим в рамках определённой парадигмы.
Поэтому нужно просить потенциальных потребителей описать типичный процесс (именно описать, что человек делает, зачем и так далее). И только в таком случае вы сможете увидеть нюансы. Причём данный приём — всего лишь один из многих в этой методике.
Когда мы сделали своего робота, мы сразу же отправились на международные выставки и тематические конференции.
В 2017 году мы посетили крупные выставки в России, Германии, Нидерландах и США. Это было полезно. Во-первых, это важно для маркетинга и продаж. Первые покупатели пришли именно с выставок.
Во-вторых, мы смогли пообщаться с нашими клиентами. Дали им робота. Предложили взаимодействовать с ним. Получили полезную обратную связь. И теперь мы готовим вторую версию робота, в которую войдёт большинство замечаний, полученных нами от пользователей.
Чем быстрее вы представите свой продукт, пусть и с минимальной функциональностью, тем лучше. Помните: продукт никогда не бывает полностью готов. Он всегда находится на стадии доработки и усовершенствования. Но нужно начинать показывать продукт, когда за него ещё немного стыдно.
Ещё один важный момент заключается в том, что менеджера по продажам вы должны нанять на самом первом этапе. Как только у вас появилась идея. Идеальная ситуация выглядит так: вы получили сто условных полностью оплаченных предзаказов ещё на этапе проектирования.
И я сейчас абсолютно не шучу. Если у вас классный продукт (а иначе зачем этим заниматься), вы должны уметь донести его пользу до ваших клиентов так, чтобы они были благодарны вам за то, что стали первыми покупателями.
В рамках организации процесса продаж предстоит сделать выбор в пользу той или иной модели. Можно зарабатывать на продажах как таковых, на сервисе или дополнительных опциях.
Если говорить о нашей сфере, то традиционная модель продаж выглядит следующим образом:
Производитель робота — дилер, который привозит робота в другую страну, — интегратор, устанавливающий робота на производство, — конечный пользователь.
Одной из задач, которую мы ставили перед собой при выходе на рынок, было упрощение существующей цепочки. Основная цель — сделать всё проще и дешевле.
Отказаться от интегратора — значит упростить процесс внедрения робота настолько, насколько это возможно. При этом важно помнить, что быстрый и максимальный охват возможен благодаря большому количеству дилеров, которые становятся проводниками вашего продукта на местах.
В итоге мы выработали определённую модель продаж.
Во-первых, заказать робота и оплатить его можно прямо на сайте.
Так мы сломали существующую парадигму. Заходишь на сайт. Видишь всю информацию. Оплачиваешь карточкой или со счёта. Служба доставки привозит тебе робота прямо домой.
Во-вторых, мы решили не отказываться от традиционной модели работы с дилерами.
Предложили своим поставщикам серьёзную скидку, дали рекомендованную цену, но предупредили, что если цена будет отличаться, покупатель всегда предпочтёт купить напрямую на сайте и сэкономить.
В-третьих, интеграция.
Мы разработали и подготовили большое количество видео- и текстовых инструкций о том, как собрать, запустить, настроить и запрограммировать робота. При этом сам софт отличается максимальной простотой.
А покупатель всегда может получить помощь от разработчика удалённо или пригласить к себе авторизованного дилера-интегратора (что является дополнительным источником заработка для наших дилеров).
Текущая модель — не лучшая и не идеальная. Она просто другая. И одна из десятка возможных. И, наверное, только время покажет, насколько она будет успешна.
Друзья, я перечислил пять шагов, необходимых для того, чтобы создать коммерчески успешного робота. Наверное, кто-то заметит, что эти же пять шагов необходимо сделать для создания любого коммерчески успешного продукта. И это правда.
Робототехника — это не только и не столько технологии, сколько бизнес. И для того, чтобы делать то, что вы любите, и этим менять мир вокруг, надо, чтобы этот бизнес был успешным. А про крутящий момент и момент инерции вы можете прочитать в любой книге.
Создавайте роботов. Верьте в себя. Верьте в команду. Пробуйте. Ошибайтесь. Пробуйте снова. И помните: что бы у вас ни получилось, сделайте в следующий раз лучше или по-другому.
Напишите в комментариях, с какими трудностями сталкиваетесь вы, работая над своим проектом. Неважно, в какой сфере вы развиваетесь. Если же у вас робототехнический проект — мы будем рады ответить на любые вопросы, не освещённые в материале.
Молодцы! Отличная статья и отличный робот!
К сожалению, не вижу на вашем сайте цен на вашу продукцию.
Интересуют цены на моторы и серводвигатели.
Что касается, серв, то, например, RD50 (14 Нм, 80W, 440 g) - где-то 2.290 USD. Это уже цена за серву с редуктором, контроллером, 2 магнитными энкодерами и бескорпусным двигателям. Все компоненты встроены в сам корпус. Большие модели стоят чуть дороже. Если бескорпусные - то цена порядка 330 USD. Но, многое зависит от партии и проекта. Вы над чем работаете?
Спасибо за ответ! Однако, было бы удобнее цены сразу на сайте видеть. А то цена по запросу - это как на сайтах большинства старых предприятий, оставшихся со времён СССР.
Работаю над проектом кобота, но для "домашнего использования".
Согласен, открытость - наше все). В новой версии сайта - появится вся информация. Работаем над этим! А вам удачи в вашем проекте! За коботами будущее!
можно вашу почту?)
Вообще, средняя цена на нашего кобота 18.500 USD.
Спасибо за статью, часто упоминаю вас как пример крутого робото-стартапа страны. Какие у вас планы по развитию и выходу на рынки в ближайшие 2-3 года?
А ещё интересно, как непроизводства оценивают эффективность вложение в кобота. Например, уже упомянутого бота-бариста. И когда коботы (либо иные виды манипуляторов) придут (основательно) в непроизводственные рынки. Или в целом на эту тему мысли.
Упоминайте! Нам приятно.
По планам и рынкам: в апреле мы выпускаем первую партию серийных коботов 2-го поколения. В этом году хотим сконцентрироваться на российско-белорусском сегменте. Удовлетворить принятые заявки и предзаказы со всех регионов (Европа, Азия и Океания, Северная Америка), но маркетинг и продвижение для лидогенерации делать, в первую очередь, на РФ. По свежим данным IFR - плотность роботов в РФ одна из самых низких в мире -
1 шт на 10 000 работников. http://markets.businessinsider.com/news/stocks/SMBs-to-Drive-Collaborative-Robotics-Growth-as-they-Seek-a-More-Flexible-Manufacturing-Process-1015049546
Поэтому, с учётом схожести ментальности, локализации производства, размера рынка и т.д., мы видим для себя серьёзный потенциал в этом регионе.
Что касается, непроизводств - востребованы коботы for fun, в первую очередь, в круизных лайнерах, банках, IT-компаниях, конференциях, сетевые отелях и пр. В данном случае кобот - это такой eye-catcher. Он тормозит и локализует проходящий мимо трафик + большое количество share в сети. А вопрос монетизации это уже решение конкретного бизнеса. Для многих, кстати, это способ быть "передовым" в глазах клиентов, партнёров и т.д.
Уверен, с удешевлением коботов и ростом их популярности (небольшое количество людей знают о таком), они будут всё более востребованы в non-industrial market.
Наверное, когда-нибудь и до личного использования дома таких колоботов дойдёт, молодцы, двигаете прогресс!

Эти компоненты вы можете приобрести либо все вместе Двуногий робот Gekko "Ходок" (конструктор без электроники), либо по отдельности в этом разделе сайта. При покупке всего механического комплекта робота вы так же получите:
Электронная часть робота, реализованная из следующих компонентов:
· Аккумулятор AA емкость 2500mA/H(китайские взяты в ларьке) - 4 шт
Как видите, все кроме аккумуляторов (которые вполне можно заменить любыми батарейками типа АА), можно приобрести в разделах сайта РОБОТОТЕХНИКА на страницах, которого, вы читаете данную статью, и который, непосредственно обладает правом на её размещение. Так же вы можете использовать любые другие компоненты, которые на ваш взгляд, лучше подходят для целей реализации данного проекта, но в этом случае возможные некоторые расхождения между моим описанием и реальной картиной вашего творческого процесса;)
В рамках этой статьи вы научитесь собирать и приводить данного робота в движение. При этом в него будет заложен следующий функционал:
1) Автоматический режим – при этом робот будет самостоятельно передвигаться, шагая прямо и при появлении перед собой препятствия (в виде любого непрозрачного для инфракрасного излучения предмета) будет разворачиваться вправо или влево с целью обойти препятствие. В случае если препятствие не удается обойти (например, робот застрял в углу) будет включаться режим передвижения задом до момента выхода за границу зоны взаимодействия с препятствием.
2) Функционально-исполнительный режим – при этом робот будет устанавливать положение сервоприводов в соответствии с положением управляющих элементов на форме приложения для Windows. В этом режиме будет осуществляться создание всех моделей поведения, которые будут доступны в роботе.
так как этой функции просто нет, и вряд ли будет. Так же вам вряд ли удастся создать сколько-нибудь жизнеспособный линейный алгоритм для управления роботом, что-то вроде повернуть сервопривод 1 на косинус угла сервопривода 2 и тому подобных решений. И этому виной ряд причин:
1) Все сервоприводы даже дорогие и весьма надежные имеют разброс рабочих характеристик. Т.е. один и тот же сигнал для каждого сервопривода установит вал привода не в строго одинаковое положение.
2) Все сервоприводы имеют нелинейности по всей шкале своего возможного запаса хода. Т.е. например изменение длительности импульса с 1800 до 1900 микросекунд может привести к перемещению вала на большей или меньший угол, чем например изменение длительности с 1900 до 2000 микросекунд, причем положение этих нелинейностей может существенно отличаться для любых двух сервоприводов, даже из одной партии.
3) Даже если не брать в расчет мелкие нелинейности по различным участкам шкалы имеются и существенные общие нелинейности характерные для всех сервоприводов одного типа. Может оказаться так, что во всех экземплярах шкала чуть более растянута в начале и чуть более сжата в конце с плавным переходом от начала до конца. С одной стороны может показаться, что это искажение не столь существенно т.к. оно характерно для всех сервоприводов в равной степени. Но если посмотреть на практическую сторону вопроса, то становится ясно, что сервоприводы на разных ногах стоят в обратной положении т.е, если робот например наклоняется вперед то один из сервоприводов делает положительное приращение, а второй отрицательное и в этом случае наличие даже обще характерного для всех приводов искажения очень сильно усложняет процесс создания линейного алгоритма управления.
4) Стандартный сервопривод не имеет полностью свободного хода на 360 градусов, а он способен вращаться в определенном секторе, обычно общая его протяженность составляет от 200-270 градусов. При сборке робота вы установите все сервоприводы в совершенно случайные положения, т.к. вам будет необходимо в первую очередь обеспечить наличие возможного хода в конструктивных пределах. Т.е вы поставите сервоприводы так что бы робот имел как можно более широкие пределы поворота частей при этом, постаравшись сделать эти пределы схожими на обеих конечностях. После того как вы это сделаете ваше и без того не простая линейная модель по мимо всех сотен поправочных коэффициентов на нелинейности сервоприводов обзаведется еще и массивом исходных положений сервоприводов и позициями максимальных возможных передвижений.
Этот не малый список проблем далеко не полный, из тех, что вам придется преодолеть в попытке написания своего линейного алгоритма управления роботом и при этом даже если у вас это получится (что у меня, например, очень плохо получилось), ваше устройство станет практически неповторяемым. Если вы захотите написать статью о робототехнике подобную этой или просто поделиться своими исходниками с другом, который решил собрать себе такое же устройство вы столкнетесь с тем, что вам опять придется собирать огромное количество уникальной информации для каждого сервопривода его проекта. А если же вы захотите выйти за рамки этого проекта и собрать, например робота не на 6 сервоприводах как этот, а например на 18 (например 6-ногий паук с ногами с 3 степенями свободы) или еще большим числом, то ваш проект может запросто разбиться о невероятные трудозатраты. Так же если вы захотите в какой-то день оптимизировать вашего робота или добавить новый функционал, либо просто немного изменить имеющийся, это станет очень непростой задачей. Таким образом, линейный алгоритм слабо применим для моделей с ходовой частью, реализованной на сервоприводах под управлением платформы Arduino и технически реализованный указанными выше средствами. Для того что бы реализовать линейный алгоритм управления роботом необходимы существенно более серьезные вычислительные мощности и более серьезные технические средства, а в конце этой статьи вы сможете найти их описание, но ведь мы хотели реализовать ходящего робота теми средствами, которые у нас есть… Как же быть? Тем более, я обещал, что будет и хорошая новость))
В этой статье я опишу, как управлять роботом использую дискретный алгоритм управления. В чем заключается суть этого алгоритма. Необходимо путем подачи на робота управляющих сигналов с компьютера установить его сервоприводы в положения соответствующие устойчивым промежуточным значениям планируемой модели поведения. Например, мы хотим, что бы робот сделал один шаг правой ногой, это действие можно совершить поочередно перейдя из одного дискретного состояния в другое при чем, для того что бы робот сохранял устойчивость во всех точках этого движения перемещения должны осуществляться между заведомо устойчивыми позициями. Далее я приведу примерный список позиций которые робот должен поочередно пройти что бы сделать один шаг правой ногой:
1) Наклонить опорные сервоприводы так, что бы робот перенес центр тяжести на левую ногу и правая нога немного оторвалась от земли
2) вернуть роботу относительно прямое положение при этом, не потеряв устойчивость левой ноги стопу правой ноги позиционировать параллельно земли
3) Поднять правую ногу вперед сложив её в колене, что бы сохранить положение стопы параллельным земли, левую ногу немного сложить в колене, при этом немного отклонив корпус назад для сохранения у корпуса положения параллельного земле
4) Наклонив опорные сервоприводы перенести центр тяжести равномерно на обе ноги.
В среде разработки Arduino имеется библиотека Servo созданная специально для управления сервоприводами. С помощью нее можно достаточно просто задать положение сервопривода. Причем положение можно задавать как в градусах, так и в микросекундах. С одной стороны может показаться, что управлять градусами проще, но это не совсем так по следующим причинам:
1) Управляя градусами мы можем задать положения сервоприводов только в пределах от 0 до 180 градусов, если мы передадим значение более 180 то будет отработано 180 и соответственно если передать меньше 0 то будет отработано 0. На практике же разница между положением которое серва отрабатывает при 0 и 180 далеко не всегда равна 180 градусам, а это может быть как 160 так и 200 градусов, т.е. точность совсем не какая. Так же стоит отметить что конструктивно сервопривод может довернуться дальше как в сторону 0 так и в сторону 180. Т.о. образом может возникнуть ситуация при которой вы установите сервопривод, механически проверите его возможность двигаться в пределах конструктивной свободы. Когда начнете на него подавать сигнал окажется, что при задании позиции с помощью с управления градусами вы не сможете переместить движок серво в крайнее конструктивное положение т.к. 0 или 180 будет находиться раньше чем, то положение, куда бы вы хотели переместить вал.
2) Для того что бы точно позиционировать вал привода в некоторых случаях разрешения в 1 градус может быть не достаточно, например если двигать системой с большой длиной рычага (как например бедренный сустав робота), в этих случаях перемещения в даже в 1 градус могут выглядеть достаточно резкими и рывковыми. При управлении длительностью импульса реальное разрешение более чем в 10 раз превосходит разрешения при управлении градусами.
3) Не каких тригонометрических расчетов в процедуре при движении робота осуществляться не будет и по этой причине какой-либо практической необходимости в применении градусов просто нет.
Из вышесказанного вы, наверно поняли уже поняли что в тех скетчах, которыми мы будем оперировать в рамках этой статьи управление сервоприводами будет осуществляться методом передачи длительности импульса в микросекундах. Теперь осталось только выяснить некоторые возможности конкретно тех сервоприводов, которыми вы располагаете, что бы система работала точно. Нам необходимо получить предельные значения длительностей импульса при которых конкретно ваши сервоприводы смогут перемещаться во всем возможном секторе и для этого необходимо выполнить следующую последовательность действий:
1) Нумеруем сервоприводы в нашем случае от 0 до 5 (т.е. их всего 6). До тех пор пока робот не будет запущен, и не будут получены все необходимые сведения, нанесенные на сервоприводы номера должны четко просматриваться. Нумеровать сервоприводы стоит карандашом или тонким маркером.
2) Необходимо залить на вашу отладочную плату исходник (их обычно в данной среде называют скетчами) в начале я указал DFRduino Nano, но может сгодиться любая плата, рассчитанная на программирование в среде разработки Arduino. В этой статье я не буду описывать, что такое Arduino и как с ней бороться т.к. я рассчитываю, что вы хоть немного уже в этом и сами разобрались. Скетч, который вы будете загружать на плату делает следующее действие: к плате необходимо подключить любой переменный резистор сопротивлением от 10 до 50 килоОм и один сервопривод, которым мы будем управлять с помощью резистора, при этом текущее значение длительности импульса будет возвращаться на монитор порта. В чем заключается смысл этого действия? Нам необходимо получить для каждого из ваших сервоприводов предельные величины длительностей импульса которые переводят сервопривод из одного крайнего положения в другое. Полученные величины для каждого сервопривода необходимо зафиксировать и выбрать максимальное и минимальное значение. Ниже приведу таблицу с примером:

В своей работе ученик рассматривает историю и устройство роботов. Также описывает план создания простейшего робота и результаты работы.
| Вложение | Размер |
|---|---|
| исследовательская работа о роботах | 116.8 КБ |
Предварительный просмотр:
ученик 3 – а класса Руководитель: Баранова Ирина Владимировна
Глава 1. Роботы: история создания, использование человеком
- История создания роботов………………………………….4-5
- Устройство роботов и как они работают ………………..6
Глава 2. Практическая часть: создания робота………………………… 12-13
С развитием техники нашу жизнь заполонили роботы. Посмотрите вокруг: мы каждый день пользуемся сотовыми телефонами, компьютерами, ездим на машинах, в больших торговых центрах пользуемся эскалаторами, а в высотных домах – лифтами, чтобы подняться или опуститься с этажа на этаж. Мы часто пользуемся автоматами с разной едой, сладостями и напитками: опускаем монетки, нажимаем кнопочки, чтобы выбрать то, что мы хотим съесть или выпить, а автомат дает нам то, что мы выбрали.
Роботы используются на заводах и промышленных предприятиях для выполнения однообразной и часто опасной работы. Больше всего промышленных роботов используется в автомобильной промышленности, где они выполняют сварку, покраску и сборку деталей. Роботы пока ещё не заменили полностью людей в промышленности, но использование труда человека в производстве сокращается. Полностью автоматизированные фабрики есть в Техасе, это, например, фабрика IBM для сборки клавиатур. Люди там уже не нужны: абсолютно всё производство, от момента выгрузки материалов и до получения готовой продукции у погрузочных ворот, полностью роботизировано и может работать круглосуточно и без выходных.
Роботы – это механические помощники человека, которые выполняют работу по заложенной в них программе и могут реагировать на то, что их окружает. Роботы изменили жизнь человека, многие люди не могут жить без роботов.
С момента своего появления роботы тоже очень изменились от очень простых механизмов до сложных устройств, во многом превзойдя по своим возможностям человека.
Актуальность:
Тема роботов меня интересует давно. Я часто смотрю по телевизору программы и фильмы про роботов, в которых роботы помогают людям в их жизни, а иногда даже могут вместо человека делать какую-нибудь сложную работу.
Мне интересно, что же это такое. В моей жизни я тоже часто сталкиваюсь с роботами. Например, у всех в нашей семье есть сотовые телефоны, дома у нас есть компьютер, телевизор, пылесос, стиральная машина, микроволновая печь. Вся эта робототехника во многом нам помогает, облегчает нашу жизнь. Все роботы сделаны на различных фабриках, заводах. И я задумался, а можно ли самому сделать робота.
Цель: сделать из подручных средств простейшую модель робота.
- найти информацию о роботах;
- попытаться самому собрать робота.
- просмотр программ телевидения
- поиск информации в интернете
- анализ и обобщение полученной информации
- практический
Практическая значимость работы состоит в том, что её результаты могут быть использованы в школе на занятиях по робототехнике.
Глава 1. Роботы: история создания, использование человеком
1.1. История создания роботов
Ро?бот — аппарат, способный самостоятельно взаимодействовать с внешним миром и обладающий искусственным интеллектом или его зачатками. Обычно представляется в виде механического человека, реже предполагается колёсный робот. Часто роботами в рекламных целях или по незнанию называют автоматы и удалённо управляемые людьми устройства. Человекоподобный робот зовётся андроидом.
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе , который вдохнул жизнь в созданную им статую — Галатею.
Самый древний в истории механический человек был сделан в 1540 году итальянцем Джанелло Делла Торре. Для развлечения императора Карла V он смастерил лютнистку, которая умела ходить и извлекала из своего инструмента звуки. Спустя два века швейцарский часовщик Пьер Жакке- Дроз продолжил работу начатую Делла Торре. Он конструировал красивейшие автоматы, которые функционировали за счет пружинного механизма, похожего на часовой.
штамповочных и сварочных участках, в покрасочных камерах, на сборке. Разумеется, роботы не могли сразу заменить людей в промышленности, но доля человеческого труда в производстве с тех пор неуклонно сокращается. Полностью автоматизированные фабрики, такие как фабрика IBM для сборки
клавиатур в Техасе, называются "фабрики без освещения". Люди там уже не
нужны: абсолютно всё производство, от момента выгрузки материалов и до
получения готовой продукции у погрузочных ворот, полностью роботизировано и может работать круглосуточно и без выходных.
Роботы – это необычный тип машин, которые сконструированы таким образом, чтобы выполнять сложные виды работ самостоятельно – без участия человека.
Роботы очень выносливые, они могут работать сутками без сна и отдыха, им не нужно есть и пить. Роботы не жалуются на низкую зарплату, им не нужны выходные и перерывы. Единственное, что им нужно – это технические осмотры и изредка – ремонт. Поэтому роботам обычно поручают самую трудную, тяжелую и опасную работу.
1.2. Как устроены роботы и как они работают.
Роботы бывают разных размеров от микроскопических – похожих на маленьких мушек, до огромных – размером с многоэтажный дом.
Силу и способность двигаться роботу дают электрические моторы или двигающиеся при помощи воздуха или жидкости цилиндры, которые называются приводом.
Некоторыми роботами люди могут управлять, находясь от них очень далеко, при этом команды роботу человек посылает по радиосвязи или по подключенному к роботу кабелю. Например, робот Джейсон-младший может проникать в затонувшие корабли и подводные лодки, обследовать их изнутри, делать фотографии и подбирать обнаруженные внутри затонувших судов предметы.
Некоторые роботы могут выполнять задания сами, без управления человеком. Такие роботы запрограммированы человеком на самостоятельную работу. Про таких роботов говорят, что они обладают искусственным разумом или интеллектом.
1.3. Виды роботов
Существует два основных типа роботов: промышленные – те, которые трудятся на заводах и фабриках и обслуживающие – те, которые работают в домах, офисах, в парках и садах.
Обслуживающие роботы помогают людям в больницах, офисах, домах и садовых участках. В таких роботах встроены сенсоры, которые могут обнаружить любое препятствие, и помогают роботам свободно передвигаться, не на что не натыкаясь.
Из интернет - источников я узнал, что роботы ещё бывают: механические, биороботы, нанороботы. Выяснил, что есть идеальные роботы, которые используются для предсказания погоды, размеров урожая, выпуска промышленной продукции.
Робот Riba выполняет функции вилочного погрузчика для людей с ограниченными функциями опорного аппарата, помогает своим пациентам, которые не могут ходить, сидеть или самостоятельно стоять. Современные мобильные роботы работают во вредных или опасных для человека условиях. Например, при ликвидации последствий аварий, при
работе с взрывоопасными предметами. Использование мобильных роботов в таких условиях позволяет человеку не рисковать своей жизнью и здоровьем.
Все знают, что работа пожарных очень опасна. Поэтому были созданы роботы для тушения пожаров.
Для обнаружения и обезвреживания взрывчатки существуют роботы-саперы, оборудованные специальными видеоустройствами. Такие роботы передают изображение взрывных устройств человеку, находящемуся на безопасном расстоянии. Рука робота может безопасно для находящихся вблизи взрывчатки людей захватить бомбу, переместить её в специальный контейнер, чтобы избежать взрыва.
Для уничтожения взрывного устройства некоторые роботы используют водяную пушку. Вода выстреливает тонкой струёй с очень большой силой, разрушает электрические провода бомбы и предотвращает взрыв.
Большинство людей не замечают, что рядом с ними повсюду действуют роботы-полицейские, роботы-охранники и роботы-шпионы. Роботы охраняют
важные объекты и добывают секретную информацию о террористах.
Роботы-охранники в отличие от охранника-человека могут работать 24 часа в сутки без сна, еды и воды, их трудно отвлечь, и они могут поднять тревогу, если на них совершено нападение.
Роботы часто выполняют очень опасные задания. Например, они могут обследовать логово бандитов или доставить мобильный телефон преступнику, захватившему заложников, чтобы с ним могли поговорить полицейские.
Полицейские дирижабли и беспилотные летательные аппараты наблюдают за территорией, фотографируют и передают людям, находящимся на земле, информацию о происшествиях, о военных базах противника.
Роботы успешно проводят операции на глазах, на головном мозге, используя очень тонкие инструменты. Роботы могут круглосуточно вести наблюдение за больными, которым требуется постоянный уход. Роботы никогда не устают и их стальные руки не дрожат после нескольких часов работы.
В космосе тоже работают роботы. Людям для работы в космосе нужны воздух, вода, еда и разные инструменты, а роботам для работы в космосе нужен только источник энергии.
Отсутствие на Марсе кислорода, воды и высокая температура (до 100 градусов) затрудняют исследование этой планеты людьми. Поэтому люди поручили исследование Марса роботам-марсоходам. Такие роботы оборудованы различными сенсорами, инструментами и манипулятором при помощи которых марсоходы могут убирать с пути тяжелые камни и исследовать почву планеты.
Ученые всегда хотели создать механическую копию человека. Целью роботостроителей является создание робота подобного человеку с развитым искусственным интеллектом. Но человек – это очень сложное существо. Человек может чувствовать, выражать эмоции, такие как радость, гнев, грусть, страх и другие. Человек обладает мощным мозгом, совершает множество движений. Поэтому машине – роботу очень сложно повторить человека, робот не может быть таким, как человек.
Ученые-исследователи всего мира работают над созданием роботов похожих на людей. Например, есть робот – партнёр для танцев, который реагирует на перемещения человека и копирует движения тела и рук человека.
– тренеров, готовящих к соревнованиям людей.
На его голове находится множество сенсоров, которые помогают ему определить: гладят его, хвалят или ругают.
В будущем роботы смогут выполнять всё, что может человек. Человек больше не должен будет работать, всё будет обеспечиваться трудом роботов. Люди будут значительно больше заниматься творчеством, отдыхать и наслаждаться жизнью.
В южнокорейской университетской клинике Чунг-Анг успешно проводится роботизированная замена коленного сустава с хирургической системой CUVIS-joint компании Curexo. Такие операции отличаются исключительной точностью планирования вмешательства и установки имплантатов, малой травматичностью, низким риском осложнений и обеспечивают максимально долгое и комфортное использование эндопротеза.
Эндопротезирование суставов во всем мире развивается по пути повышения функциональности имплантатов и увеличения срока их службы. Существенно улучшить эти показатели позволяют специальные хирургические роботы.
Роботизированная хирургия – новая технология в замене коленного сустава
Недавно операционный блок университетской клиники Чунг-Анг в Сеуле был оснащен хирургическим роботом по замене суставов CUVIS-joint южнокорейской компании Curexo, специализирующейся на разработке роботизированных хирургических вспомогательных систем. Робот по замене суставов CUVIS-joint стал 4-м в мире и 1-м в Корее, получившим лицензию от Министерства безопасности пищевых продуктов и медикаментов Кореи.

Как проводится роботизированная замена коленного сустава?
Операция по роботизированной замене коленного сустава включает несколько этапов:
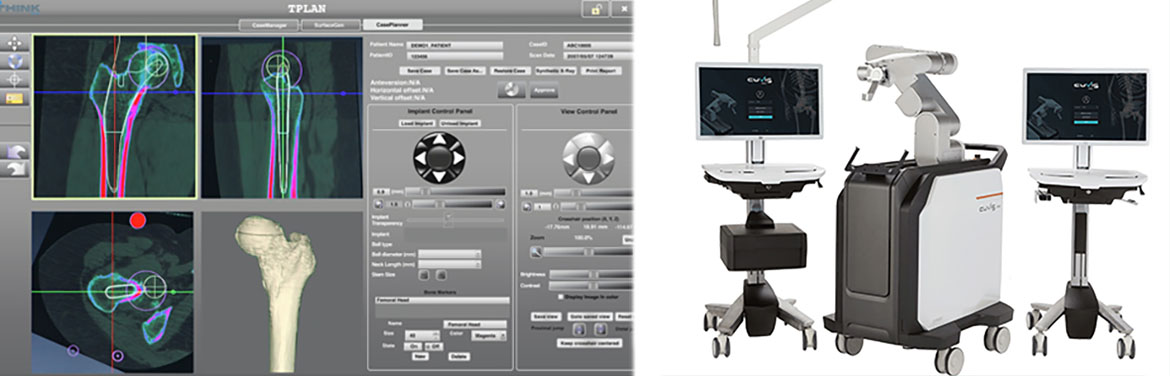
- планирование на основе 3-мерной модели сустава, созданной по результатам компьютерной томографии. Итогом становится компьютерная программа оптимальной резекции и расположения фрезевых отверстий в костях, обеспечивающая идеальное позиционирование имплантата для конкретного пациента;
- операция по замене коленного сустава. Хирург осуществляет доступ к суставу и совмещает его ориентиры с ключевыми точками, заложенными в компьютерной программе робота. Затем роботизированная система CUVIS-joint с субмиллиметровой точностью реализует план по резекции пораженных тканей и созданию каналов для крепления эндопротеза сустава. Далее устанавливается имплантат и проводится тестирование его функционирования. Операция завершается ушиванием мягких тканей.
Преимущества роботизированной замены коленного сустава
Роботизированная хирургическая система CUVIS-joint позволяет достичь недостижимой для человека точности в подготовке суставных поверхностей и костных каналов для оптимальной имплантации эндопротеза коленного сустава с учетом уникальных особенностей каждого организма. Поэтому пациенты, оперируемые с помощью робота CUVIS-joint компании Curexo, получают многочисленные преимущества:
- существенно сокращается продолжительность операции;
- исключается непреднамеренное повреждение тканей;
- обеспечиваются идеальные условия для максимально продолжительной и качественной эксплуатации эндопротеза;
- уменьшается объем операционной травмы за счет сверхточного удаления только поврежденных тканей и сокращения размеров операционного доступа, достаточных для манипуляторов робота, в отличие от традиционной операции;
- максимально сохраняются связки, нервы, мышцы, сосуды заинтересованной области;
- послеоперационное восстановление протекает более быстро и менее болезненно;
- снижается вероятность послеоперационных осложнений;
- значительно снижается кровопотеря и, следовательно, реже возникает необходимость в переливании крови;
- небольшой, по сравнению с классическим, разрез мягких тканей обеспечивает лучший косметический эффект.
Таким образом, роботизированная замена коленного сустава позволяет достичь максимальной точности в установке имплантата, исключив ошибки в его позиционировании, каковыми бы ни были анатомические особенности пациента.

Читайте также: