Как сделать растровую карту
Добавил пользователь Алексей Ф. Обновлено: 31.08.2024
Порядок отрисовки такой: 0-50 - элементы встроенной карты отображаются поверх растровой карты; 50 и выше - не отображаются (что неудобно). Ползунком прозрачности можно эту самую прозрачность регулировать. Удобно менять много раз пока выравнивается карта. После того как карта окончательно встанет на место можно жать "ок". Перед тем как начинать выравнивать изображение можно добавить отсутствующие или криво расположенные в гугле метки - деревни, улицы, в общем все что поможет точнее его наложить. Кнопка с желтой кнопкой и плюсиком "добавить метку" - слева. Потом кстати можно залить их в навигатор.
Потом надо сделать *.kmz файл - он будет представлять из себя этот jpeg и текстовый файлик с его координатами:
Дальше благостно настроенные ребята из гармина пишут:
"Как только ваша карта сохранена в устройстве, она будет отображаться как часть общей карты. По умолчанию режим Garmin Custom Maps включен, но его можно отключить в меню Map Setup (пункт Map Information)."
Ага, щаз. Вот до этого "как только" еще пахать и пахать. Надо сказать, если карта очень маленькая (1024x1024px), то навигатор ее скушает, но кому нужна карта на которой ни фига не видно? Итак. Все карты большего разрешения надо резать.
- Open calibration, надо выбрать тип файлов “Google Earth Overlay kml/kmz”.
- после открытия программа перелопатит архив и выдаст такие окошки:
- File > Write Garmin Custom Map. Открывается порезанная на куски карта. Теперь надо выбрать нужные фрагменты, выкинув ненужное чтобы навигатор меньше тормозил. На ненужные надо ткнуть, они отметятся знаком х.
Перед этим нужно проверить настройки программы: во вкладке Preferences должен стоять флажок Advanced Garmin Tile Control, а то эта функция работать не будет.
- Edit > Locate 7-Zip program и укажите местоположение архиватора 7z.exe.
- Кагбэ все. Автор инструкции предлагает еще один шаг, хотя все работает и без него. Нужный файл лежит в папке что-то_там_kmz: Его можно с чистой совестью копировать в навигатор и использовать по назначению.
Но ведь на картах далеко не всегда есть все нужные объекты. Если чего-то не хватает, можно добавить к растровой карте векторные элементы. Не претендую на точность и адекватность этого поста - в отличие от всего написанного выше этот способ я в общем придумала. нормальные люди такой фигней не страдают. Это работает (именно так я и нашла Пану в Лангтанге, ее вообще на картах не было), но работает через пень-колоду. В следующей серии - перенос в навигатор векторных элементов.
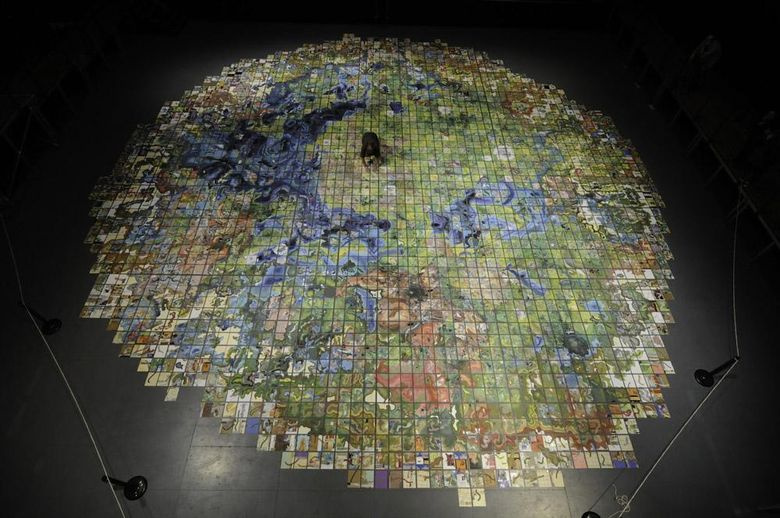
Нарисованная от руки карта в Массачусетском музее современного искусства
Современным картографам гораздо проще, чем их коллегам из прошлого, создававшим далекую от идеала схему с весьма приблизительными расчетами местоположения объектов. До начала XX века картография менялась медленно и, хотя белых пятен к тому моменту почти не осталось, точностью карты похвастаться не могли.
С началом эры аэросъемки местности картографы получили отличный инструмент, позволявший составить детальный план любой территории. Спутниковая съемка должна была, по идее, завершить тысячелетнюю работу по созданию идеального инструмента ориентирования, но картографы столкнулись с новыми проблемами.
Как инструмент решения картографических проблем и ошибок, появился проект OpenStreetMap (OSM), на основе данных которого существует наш сервис MAPS.ME. В OSM огромное количество данных: не только обрисованные спутниковые снимки, но и информация, которую знают только местные жители. Сегодня мы подробнее расскажем, как оцифровывается и становится картой реальный мир.
Фотофиксация местности
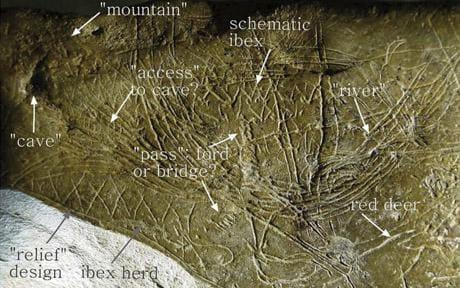
Возраст этой карты — 14 000 лет
Первые карты появились еще в период первобытной истории. Изгибы рек, гребни, овраги, скалистые пики, звериные тропы — все объекты обозначалось простыми насечками, волнистыми и прямыми линиями. Последующие карты недалеко ушли от первых схематичных рисунков.
Изобретение компаса, телескопа, секстанта, других приборов морской навигации, и последовавший вслед за этим период Великих географических открытий, привели к расцвету картографии, но карты все еще оставались недостаточно точными. Использование различных приборов и математических методов не могло стать решением проблемы — в конце концов, карты рисовал человек, используя описание или схемы, созданные на натуре.

Пример дешифрования середины прошлого века
После аэросъемки необходим длительный и сложный этап дешифрования. Объекты на снимке нужно выявить и распознать, установить их качественные и количественные характеристики, а также зарегистрировать результаты. Метод дешифрования основывается на закономерностях фотографического воспроизведения оптических и геометрических свойств объектов, а также на взаимосвязях их пространственного размещения. Проще говоря, учитываются три фактора: оптика, геометрия изображения и пространственное размещение.
Для получения данных о рельефе используются контурно-комбинированный и стереотопографический методы. При первом методе непосредственно на местности с помощью геодезических приборов определяют высоты важнейших точек поверхности и затем на аэрофотоснимки наносят положение горизонталей. Стереотопографический метод подразумевает частичное перекрытие друг другом двух снимков таким образом, чтобы на каждом из них изображался один и тот же участок местности. В стереоскоп этот участок выглядит как трехмерное изображение. Далее по этой модели с помощью приборов определяют высоты точек местности.
Спутниковая съемка
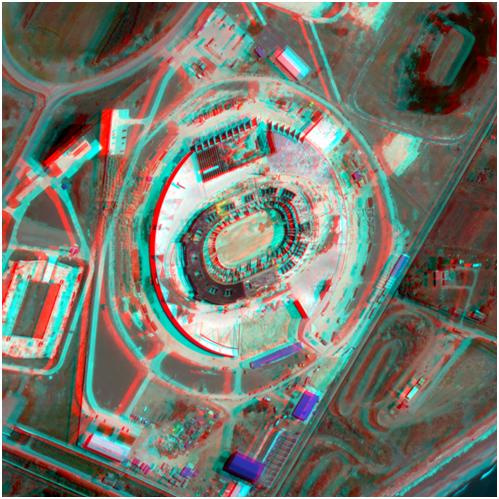
Пример стереопары со спутника WorldView-1
Схожим образом, создавая стереоизображение, работают и спутники. Информацию по рельефу (и многие другие данные, включая радарную интерферометрию — построение цифровых моделей местности, определение смещений и деформаций земной поверхности и сооружений), предоставляют радарные и оптические спутники дистанционного зондирования Земли.
Спутники сверхвысокого разрешения фотографируют не все подряд (бескрайние сибирские леса не нужны в высоком разрешении), а по заказу для определенной территории. К таким спутникам относятся, например, Landsat и Sentinel (на орбите находятся Sentinel-1, ответственный за радарную съемку, Sentinel-2, ведущий оптическую съемку поверхности Земли и изучение растительности, и Sentinel-3, наблюдающий за состоянием мирового океана).

Изображение Лос-Анджелеса, снятое спутником Landsat 8
Спутники присылают данные не только в видимом спектре, но и в инфракрасном (и еще нескольких других). Данные из невидимых для глаза человека диапазонов спектра позволяют анализировать типы поверхности, следить за ростом сельскохозяйственных культур, выявлять пожары и многое другое.


Изображение Лос-Анджелеса включает в себя полосы частот электромагнитного спектра, соответствующие (в терминологии Landsat 8) диапазонам 4-3-2. Landsat обозначает красный, зеленый и синий сенсоры как 4, 3 и 2 соответственно. Полноцветное изображение появляется при комбинации изображения с этих сенсоров.

Множество сервисов создано на основе наборов данных Global Land Survey (GLS) от US Geological Survey (USGS) и NASA. GLS получают данные преимущественно от проекта Landsat, создающего спутниковые фотоснимки всей планеты в реальном времени с 1972 года. С помощью Landsat можно получить сведения обо всей земной поверхности, а также об ее изменениях за последние десятилетия. Именно этот проект для всех публичных картографических сервисов остается главным источником данных дистанционного зондирования Земли по мелким масштабам.

Багамские острова с точки зрения MODIS
Сканирующий спектрорадиометр среднего разрешения MODIS (MODerate-resolution Imaging Spectroradiometer) расположен на спутниках Terra и Aqua, являющихся частью комплексной программы NASA EOS (Earth Observing System). Разрешение получаемых изображений грубее результатов большинства других спутников, но охват позволяет получать ежедневную глобальную коллекцию снимков практически в режиме реального времени.
Мультиспектральные данные полезны для анализа земной поверхности, океана и атмосферы, позволяя в оперативном режиме (буквально за несколько часов) изучать изменения облаков, снега, льда, водных объектов, состояние растительности, отслеживать динамику наводнений, пожаров и т.д.
Геопортал Роскосмоса — бесплатный (частично) источник данных. Спутниковые снимки предоставлены Роскосмосом и NASA, картографические данные — OpenStreetMap и Росреестром, средства поиска — GeoNames и OpenStreetMap Nominatim.

Спутники предоставляют огромное количество разнообразной информации и могут сфотографировать всю Землю, но компании заказывают данные только для нужной им территории. В связи с дороговизной спутниковой съемки, компании предпочитают детализировать территории крупных городов. Все, что считается малонаселенной местностью, обычно снимается в самых общих чертах. В регионах с постоянной облачностью спутники делают новые и новые снимки, добиваясь четкого изображения и повышая затраты. Впрочем, некоторые IT-компании могут позволить себе закупать снимки целыми странами. Например, Bing Maps.
На базе спутниковых снимков и замеров на местности создаются векторные карты. Обработанные векторные данные продают компаниям, печатающим бумажные карты и/или создающим картографические сервисы. Рисовать карты самостоятельно по спутниковым снимкам дорого, поэтому многие компании предпочитают купить готовое решение на базе Google Maps API или Mapbox SDK и доработать собственным штатом картографов.
Проблемы спутниковых карт
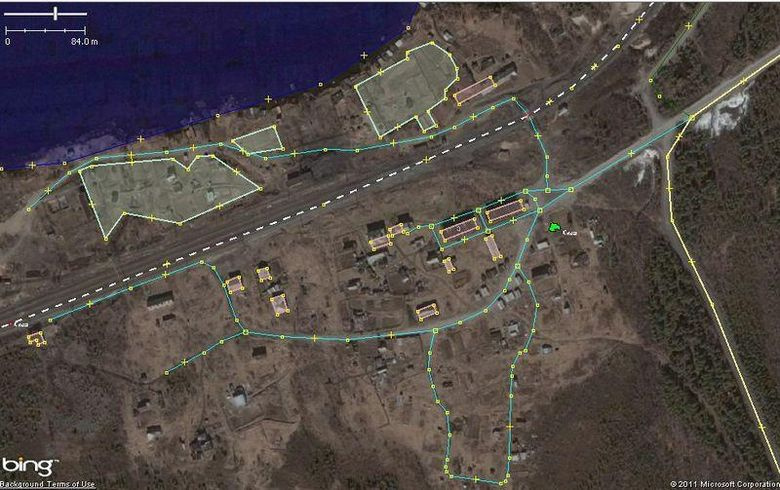
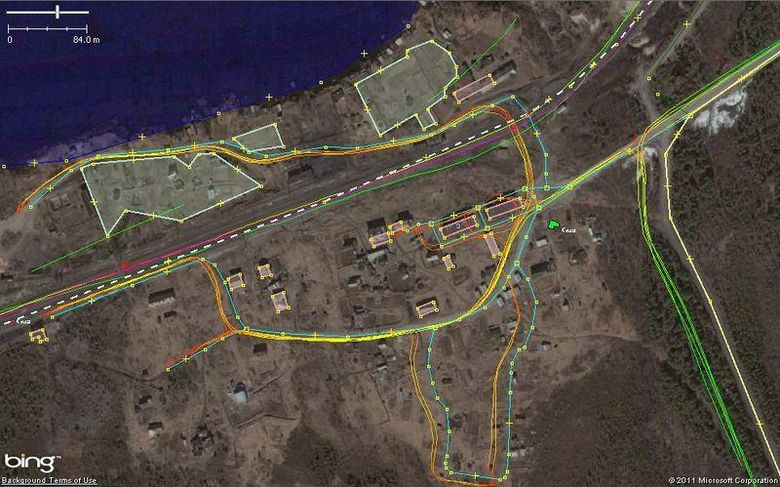
В простейшем случае, чтобы нарисовать современную карту, достаточно взять снимок со спутника или его фрагмент и перерисовать все объекты в редакторе или в каком-нибудь сервисе online interactive map creator. На первый взгляд в примере выше из OSM все отлично — дороги выглядят, как и должны выглядеть. Но это только на первый взгляд. На самом деле эти цифровые данные не соответствуют реальному миру, так как они искажены и сдвинуты относительно реального расположения объектов.
Спутник фотографирует под углом на большой скорости, время фотографирования ограничено, снимки склеиваются… Ошибки накладываются друг на друга, поэтому для создания карт стали использовать фото- и видеосъемку на местности, а также геотрекинг автомобилей, который является очевидным доказательством существования определенного маршрута.
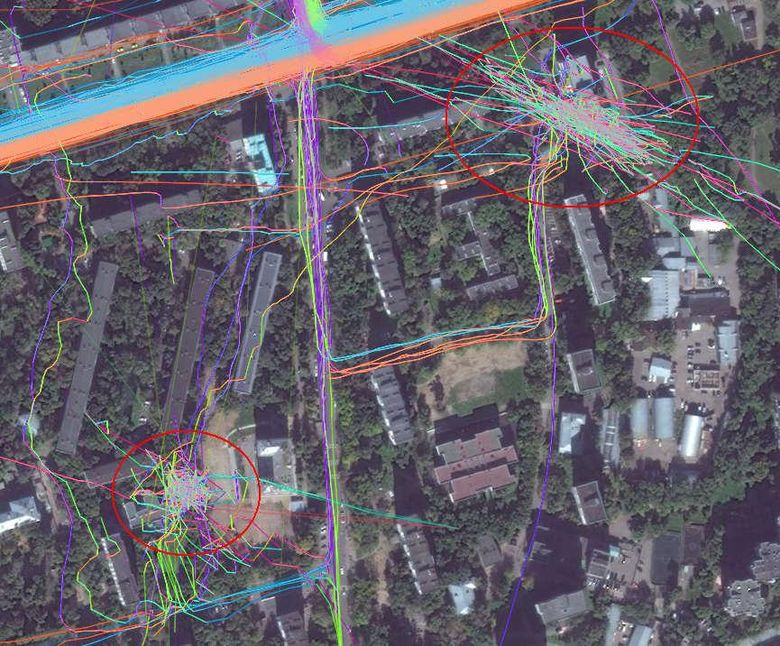
Пример снимка, на котором возникла проблема из-за плохой орторектификации: у воды треки легли отлично, а на горе справа — съехали
Рельеф, условия съемки и тип камеры влияют на появление искажений в снимках. Процесс устранения искажений и преобразования исходного снимка в ортогональную проекцию, то есть такую, при которой каждая точка местности наблюдается строго вертикально, называют орторектификацией.

Перераспределение пикселей на изображении в результате ортокоррекции
Использовать спутник, который снимал бы только над заданной точкой, затратно, поэтому съемка ведется под углом, который может достигать 45 градусов. С высоты в сотни километров это приводит к значительным искажениям. Для создания точных карт качественная орторектификация жизненно необходима.
Карты быстро теряют актуальность. Открыли новую парковку? Построили объездную дорогу? Магазин переехал по другому адресу? Во всех этих случаях устаревшие снимки территории становятся бесполезны. Не говоря уже о том, что множество важных деталей, будь то брод на реке или тропа в лесу, не видны на снимках из космоса. Поэтому работа над картами — это процесс, в котором невозможно поставить финальную точку.
Как делают карты OpenStreetMap
Изображение
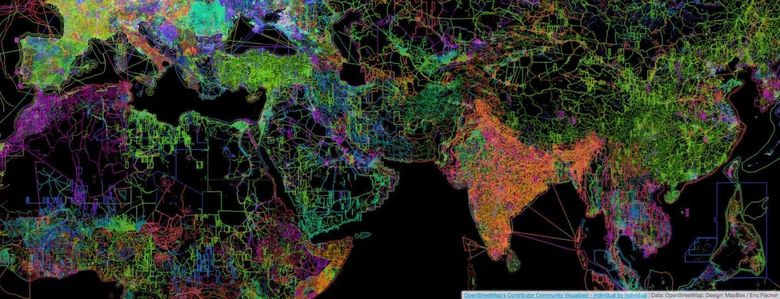
OpenStreetMap — некоммерческий картографический проект, в котором сообщество пользователей со всего мира создает открытую, бесплатную географическую карту. Для создания карт применяют данные с персональных GPS-трекеров, аэрофотографии, видеозаписи, спутниковые снимки, а также знания человека. Ближайший проект, с которым можно сравнить OSM — это Википедия. Аналогичным образом в OSM любой пользователь редактирует карту, а данные проекта распространяются на условиях свободной лицензии.
В OpenStreetMap используют в качестве основы для карт GPS-треки, записанные пользователями, и спутниковые снимки от компаний Bing, Mapbox, DigitalGlobe. Карты коммерческих компаний, например Google и Яндекса, нельзя использовать из-за юридических ограничений.
Снимки привязываются к местности автоматически на этапе получения. Сканы также можно привязать с помощью опорных точек с известными координатами, полученными из треков либо ассоциированными с пунктами геодезической сети.
При редактировании карт снимки со спутников в OSM всегда сдвигаются так, как показывают записанные на земле треки, компенсируя большинство ошибок. Есть масса приложений, позволяющих записывать GPS-треки и делиться ими, например, Geo Tracker, Strava (Android) и GPX Tracker (iOS).
Создатель карты на спутниковом снимке первым делом рисует дороги, используя данные треков. Поскольку треки описывают перемещение в географических координатах, по ним легко определить, где именно проходит дорога. Затем наносятся все остальные объекты. Недостающие и площадные объекты создаются по снимкам, а подписи, указывающие на принадлежность объектов либо дополняющие их справочной информацией, берутся из наблюдений или реестров.
Чтобы создать карту, наполненную различной информацией, используют географическую информационную систему (ГИС), предназначенную для работы с геоданными — для их анализа, преобразования, аналитики и печати. С ГИС можно создать свою собственную карту с визуализацией любых данных. В ГИС для карт можно добавить данные Росстата, муниципальных образований, министерств, ведомств — все так называемые геопространственные данные.
Откуда берутся геоданные
Итак, спутниковые снимки сдвинуты относительно реальности в несколько десятков метров. Чтобы сделать действительно точную карту, нужно вооружиться навигатором (GPS приемником) или обычным телефоном. А затем с помощью приемника или приложения в телефоне записать максимальное количество точек трека. Запись осуществляется вдоль линейных объектов, расположенных на земле — подойдут реки и каналы, тропинки, мосты, ж/д и трамвайные пути и т.д.
Одного трека никогда не бывает достаточно для любого участка — сами они тоже записываются с определенным уровнем погрешности. В дальнейшем спутниковая подложка выравнивается по множественным трекам, записанным в разное время. Любая другая информация берется из открытых источников (или дарится провайдером данных).
Трудно представить карты без информации о различных компаниях. Сбор локальных данных об организациях с привязкой к GPS-позиции делают Yelp, TripAdvisor, Foursquare, 2ГИС и другие. Сообщество (включая непосредственно представителей локального бизнеса) самостоятельно вносит данные на OpenStreetMap и Google Maps. Не все большие сети хотят сами заморачиваться с добавлением информации, поэтому обращаются к компаниям (Brandify, NavAds, Mobilosoft и другие), помогающим размещать филиалы на картах и следить за актуальностью данных.
Будущее: нейросети-картографы

Сервис для обмена фотографиями с геометками Mapillary в прошлом году добавил функцию, которая обеспечивает семантическую сегментацию изображений объектов. Фактически они смогли разделить изображения на отдельные группы пикселей, соответствующие одному объекту с одновременным определением типа объекта в каждой области. Люди делают подобное очень легко — например, большинство из нас могут идентифицировать и находить автомобили, пешеходов, дома на изображениях. Однако компьютерам тяжело было ориентироваться в огромном массиве данных.
Используя глубокое обучение на свёрточной нейронной сети, в Mapillary смогли в автоматическом режиме выявить 12 категорий объектов, которые чаще всего встречаются в дорожной сцене. Их метод позволяет добиться прогресса и по другим задачам машинного зрения. Игнорируя совпадения между движущимися объектами (например, облаками и транспортными средствами) можно значительно улучшить цепочку процессов преобразования исходных данных в двухмерную или стереоскопическую картинку. Семантическая сегментация Mapillary позволяет получить приблизительную оценку плотности растительности или наличия тротуаров на некоторых территориях городов.

Юго-Запад Москвы нейросеть поделила на зоны в зависимости от типа застройки
В проекте CityClass проводится анализ типов городской застройки при помощи нейросети. Делать карту функционального зонирования города долго и однообразно, но можно обучить компьютер отличать промышленную зону от жилой, а историческую застройку от микрорайона.

Группа ученых из Стэнфорда натренировала нейросеть предсказывать уровень бедности в Африке по дневным и ночным спутниковым снимкам. Сначала сетка находит крыши домов и дороги, а потом сопоставляет с данными об освещенности территорий в ночное время.
Сообщество продолжает следить за первыми шагами в области автоматического создания карт, и уже использует машинное зрение для рисования некоторых объектов. Трудно сомневаться в том, что будущее будет принадлежать картам, создаваемым не только людьми, но и машинами.

Краткое введение, чтобы объяснить сильные и слабые стороны карт из этой подборки. Но для начала немного теории. Изображения на компьютере могут храниться двумя основными способами: в векторном и в растровом форматах.
Растровое изображение - это сетка маленьких квадратных точек (пикселей). Файл такой картинки похож на таблицу, каждая ячейка которой хранит информацию о цвете КАЖДОГО пикселя. И чем больше разрешение картинки, тем больше размер таблицы и тем больше размер файла.

Векторное изображение - это набор геометрических фигур, раскрашенных в различные цвета. Файл представляет собой список координат точек, из которых состоят эти фигуры. И цвет заливки. Векторное изображение можно свободно увеличивать до любого размера. Количество точек, из которых состоят фигуры, от этого никак не изменится. А следовательно - не изменится и размер файла.

На практике приводит к тому, что векторные файлы значительно меньше, чем растровые. Они занимают в разы меньше места и быстрее скачиваются.
С другой стороны, растровые изображения не обязаны состоять из одноцветных фигур. За счет этого они порой выглядят более естественными. Менее “рисованными”, что-ли.

Как обстоят дела на практике?
Вы спросите, как всё это относится к картам? Дело в том, что разработчики мобильных навигационных приложений обычно разрешают скачивать именно векторные карты. Среди таких Maps.me, GuruMaps, OsmAnd и многие другие. Все эти векторные карты занимают очень мало места. Более того: для удобства пользователей они даже разделены на части, чтобы можно было скачать лишь какой-то конкретный город или регион. А еще они позволяют делать поиск объектов на карте по их названию. В общем, вполне естественно, что именно этот вариант наиболее прост, быстр и удобен для большинства пользователей.

Однако, некоторым не нравится отрисовка стандартных векторных карт. Что ж, существуют сайты, которые уже сделали более сложную и приятную глазу отрисовку тех же векторных карт, сохранили их в растровый формат и выложили для скачивания. На таких картах часто бывает рельеф местности, изолинии и прочие приятные детализированные текстуры. Просто сравните:

Увы, такие карты занимают много места, как и все растровые изображения. Для сравнения: векторная всей России занимает примерно 2 гигабайта. Растровая - 400 гигабайт. Вероятно, поэтому навигаторы на смартфонах обычно не предлагают скачивать такие карты по целыми регионами, ведь они попросту не поместятся на смартфоне. Но некоторые из них дают возможность выделить рамочкой небольшой участок местности и и скачать только его. То есть, скачать не всю Нижегородскую область, а только конкретный кусок леса, в который вы собираетесь идти в поход. Однако, даже несмотря на это скачивание может занять несколько часов и несколько гигабайт.
Вы спросите, для чего же такие трудности? Дело в том, что многие карты бывают только растровые. Спутниковые фотографии бывают только растровые. “Отсканированные” советские топокарты или карты ГосГисЦентра тоже только растровые. Некоторые турклубы выкладывают в сеть карты собственного изготовления, новые и детально проработанные. Многие из них тоже растровые.
Иными словами, если ваши потребности ограничиваются “сходить в лес на шашлыки и не заблудится”, то все эти заморочки с растровыми картами вам, скорее всего, окажутлся лишней тратой времени. Просто скачайте векторные карты для своего региона. Например, с помощью приложений Maps.me, GuruMaps или OsmAnd. Карты скачаются быстро и много места не займут.
Если же вы уже достаточно опытны и собираетесь в какие-нибудь более основательные походы, то вам могут пригодиться дополнительные (более специализированные) карты. В этом случае вам уже придется самостоятельно подбирать подходящую для вашего маршрута карту. А затем - вручную выделить нужный участок местности и поставить его скачиваться на свой смартфон.
Выводы
Так для чего я все это писал? А для того, чтобы вы понимали, что на этом сайте собраны именно тяжеловесные растровые карты. И предназначен он прежде всего, для более-менее опытных пользователей, которых не отпугнет необходимость сделать несколько дополнительных (хотя и долгих) операций, чтобы иметь возможность скачивать качественные специализированные карты прямо со своего смартфона.
Кстати, всем кто хочет более основательно разобраться в теме векторных и растровых карт предлагаю прочитать эту статью .

2. Выбираем тип карты и место.
3. Жмём "Операции с выделенной областью". Выделяем область.
4. Прокручиваем карту внутри области при максимальном необходимом приближении для того, чтобы карта прогрузилась. Остаёмся в режиме максимального приближения. Использовать приближение больше 17 (по терминилогии SASplanet) нет смысла.
5. Жмём галочку.
6. На всех необходимых вкладках появившегося окна ставим параметры. Достаточно и одной вкладки "Склеить".
7. Каждая вкладка срабатывает отдельно при нажатии "Начать". То есть, происходит только то, что установлено на текуей вкладке.
8. На вкладке "Склеить" ставим галочки ".map" и ".kml".
9. Выбираем "Результирующий формат" = kmz for Garmin. Там же в поле "Куда сохранять" выбираем что-то вроде C:\_ECHO_MAPS\KMZ\2\2.kmz
10. Жмём "Начать". Полученный файл .kmz переименовываем в .zip
11. Вынимаем из него .kml и папку files например в каталог C:\999\1 (впоследствии с этими данными можно будет работать неоднократно).
12. Открываем Insight Map Creator.
13. Выбираем View - Processing Modes - Keyhole Mode Window
14. Выбираем распакованный файл .kml (C:\999\1\doc.kml)
15. Жмём "Build".
16. После окончания процеса выбираем Viev - Processing Modes - Raster Mode Window
17. Жмём Add Folder и добавляем папку C:\999\1
18. В качестве Work Directory выбираем C:\999
19. Жмём "Build".
20. После окончания процесса копируем на Micro SD папку C:\999\BoundAT5s
21. Вставляем Micro SD в эхолот.
22. В настройках карты в эхолоте выбираем "Shaded Relief" или "Затененный рельеф".
Ещё чуть-чуть теории на основе практики:
Максимальное удаление на приборе: 600 км
Максимальное приближение: 5 м
_3DTexture_16.at5 означает, что это сборка картинок с "разрешением" 16 метров на пиксел.
В терминологии Insight Map Creator:
0,125 метра на пиксел = масштаб 5 м на приборе (максимум прибора)
0,25 метра на пиксел = масштаб 10 м на приборе
0,5 метра на пиксел = масштаб 20 м на приборе - это максимальное приближение, которое имеет смысл делать
1 метр на пиксел = масштаб 50 м на приборе
64 метра на пиксел = масштаб 5 км на приборе
.
2048 метров на пиксел = масштаб 100 км - больше делать нет смысла

Читайте также: