Как сделать корпус для робота
Добавил пользователь Евгений Кузнецов Обновлено: 31.08.2024
SERVODROID - Центр робототехники для начинающих -->Открытый образовательный проект по робототехнике своими руками -->
В данном чате вы можете общаться без регистрации - просто придумайте "никнейм" и введите капчу - и можно общаться!
Постоянно сталкиваюсь с проблемой, что нет фантазии по построению корпуса робота, чтобы моторы крепко держались и т.д. :(((((( помогите мне пожалуйста. не сложные варианты подскажите.
Azimut, а что из себя будет представлять этот робот ? Какие функции вы хотите ему задать ?
P.S. просто нужно смотреть исходя из планов.
Мне вот например нужен был бот на соревнования по футболу, корпус нужно было круглым сделать, я взял CD диски. Получилось давольно-таки неплохо, и дизайн ничего
В качестве основы одним из доступных вариантов в любительской практике рекомендую фольгированый стеклотекстолит одно или двусторонний. Он позволяет без проблем выполнять резку нужной формы и проводить установку эффекторов (дополнительных компонентов) или крепёжных частей робота. Обычно начинающие собирают робота на горизонтальной платформе, так проще установить и шасси и модуль обработки информации. Самым простым подходом в конструкции является установка моторов под углом к поверхности. Моторы крепят на уголках выполненных из консервной банки или кусочков стеклотекстолита спаянных вместе. Уголки припаивают или крепят на винтах к основной платформе. На поверхность уголка, предназначенную для установки мотора приклеивают прямоугольник из двустороннего скотча. Устанавливают мотор и прикручивают его к уголку канцелярской скрепкой или чёрной изолентой. Оба варианта крепежа имеют свои плюсы и минусы, обсуждать которые сейчас не будем. После такой установки на валы обоих моторов необходимо надеть трубочки или ролики диаметром 5-10мм для устранения проскальзывания с поверхностью и увеличения скорости передвижения. Обычно в любительской практике роботы строят по модульной схеме. То есть печатная плата с деталями, крепёжная платформа, шасси всё отдельно. В этом случае в качестве базового элемента корпуса-протектора может быть любой материал: пластмасса, оргстекло и т.д. Если обратить внимание на конструктивные особенности наборов производителей робототехники, то можно прийти к выводу, что корпусом для робота является сама печатная плата. То есть на печатной плате монтируется всё полностью электрическая схема и шасси. Этот подход в конструировании значительно упрощает модель робота и позволяет избежать проблем с конфигурацией корпуса. Геометрическая форма корпуса может быть любой, советую использовать уже готовые промышленные части от любых других устройств.
Если ваш ребенок любит фильм Звездные войны, он наверняка будет в восторге от идеи изготовить собственного робота R2-D2.
Робот R2-D2 является одним из самых запоминающихся персонажей культовой космической саги. На протяжении всех частей обеих трилогий он сопровождал главных героев, нередко спасая их из сложных ситуаций. В данной статье вы узнаете, как украсить свой дом картонной копией R2-D2.
Итак, для работы вам понадобится:
- Картон;
- Нож или ножницы;
- Ручки, карандаши или краски;
- Линейка или рулетка;
- Скотч;
- Вода;
- Клей;
- Газетная и обычная бумага;
- Кисть;
- Упаковочная пленка.
Корпус
В качестве основы для робота можно использовать как листовой картон из магазина, так и разрезанные коробки, которые вскоре станут шедевром. Сначала сделайте корпус R2-D2. Для этого нужно вырезать большой прямоугольник и свернуть его в цилиндр, после чего закрепить его скотчем.
Для скрепления цилиндра можно вырезать из картона круг и, накрыв им цилиндр с одного конца (это будет нижняя часть робота), закрепить его скотчем.
Далее необходимо вырезать основу для ног. Обязательно сверьтесь со снимками для достижения более точного результата.
Совет : перед тем, как вырезать фигуры, разметьте картон карандашом.
Верхняя часть ноги робота имеет форму полукруга, поэтому при разметке макета воспользуйтесь циркулем или чашкой / блюдцем.
После окончания работы над первой ногой, вы можете использовать ее для разметки оставшихся экземпляров. Не выбрасывайте обрезки картона – они отлично подойдут для придания объема ногам робота. С помощью клея соедините три слоя картона между вырезанными половинками ноги.
Далее начинается сложная работа с бумагой. Размешайте клей с водой. Далее нанесите клей на ноги и корпус робота, и обклейте их белой бумагой, как показано на фото. Добейтесь полного покрытия всех сторон конечностей.
Следующий этап: вырезаем из цветной бумаги (или красим) синие и серые элементы, и наклеиваем на ноги. Теперь их можно прикрепить к корпусу.
Ноги можно прикрепить сшивателем, или приклеить суперклеем. У оригинального R2-D2 есть еще и третья нога, однако в таком случае робот теряет баланс из-за сильного наклона назад, так что лучше обойтись без нее.
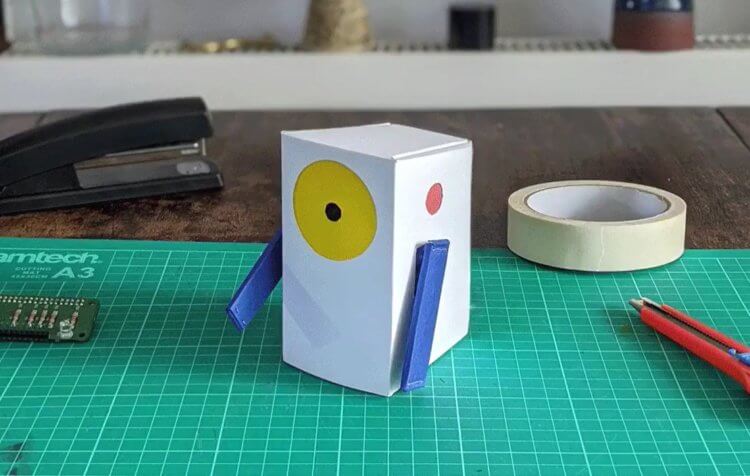
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
- Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
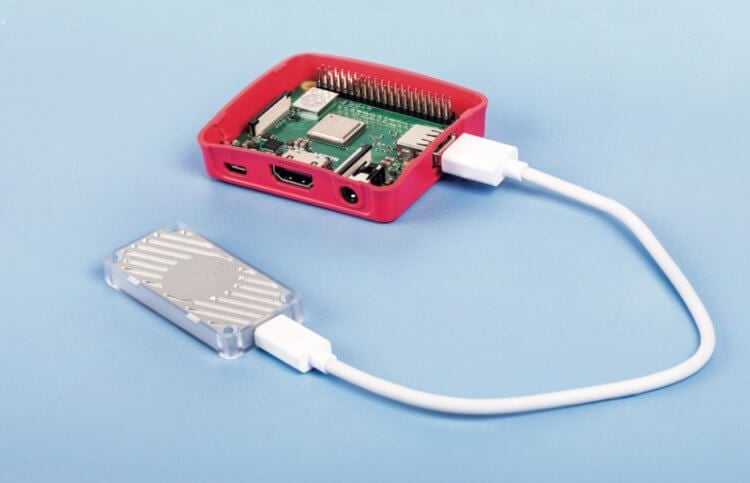
Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
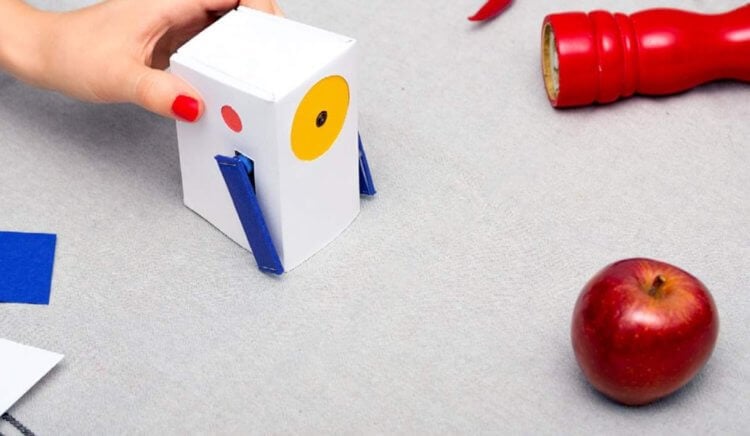
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Ритм жизни современного человека становится все более насыщенным и в его плотном графике становится все меньше времени на уборку собственного дома. В связи с этим в последнее время появляется все больше устройств, упрощающих наведение порядка в доме, одними из которых являются роботы-пылесосы, позволяющие в автоматическом режиме производить уборку пола в помещениях. У этих роботов-пылесосов достаточно много достоинств, но их существенным недостатком, сдерживающим их широкое распространение, является цена. Поэтому в данной статье мы рассмотрим создание робот-пылесоса на основе платы Arduino, который по функциональности будет мало отличаться от коммерческих моделей роботов-пылесосов, но стоить будет существенно дешевле них.

В составе робота мы будем использовать ультразвуковые датчики и инфракрасный датчик (IR proximity sensor). Ультразвуковые датчики будут помогать роботу избегать столкновения с препятствиями во время уборки помещения, а датчик приближения будет предотвращать падение робота с лестниц.
Ранее на нашем сайте мы уже рассматривали проект чистящего робота пылесоса на основе Arduino, но он был недостаточно совершенным и очень громоздким. Рассматриваемый в данном проекте робот-пылесос значительно более компактный и отличается более интеллектуальным алгоритмом работы. Также на нашем сайте вы поможете посмотреть похожие проекты роботов на основе платы Arduino:
Необходимые компоненты
- Плата Arduino Pro Mini (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 – 3 шт. (купить на AliExpress).
- Драйвер двигателей L293d (купить на AliExpress).
- Электродвигатели постоянного тока формата N20, работающие от 5 В, с кронштейнами для их установки – 2 шт. (купить на AliExpress - смог найти только на 6 В, на 5 В почему то не удалось найти).
- Переключатель.
- Регулятор напряжения LM7805 (купить на AliExpress).
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Инфракрасный датчик (купить на AliExpress).
- Перфорированная плата.
- Опорный ролик (колесо) для робота.
- MDF (из него будет делаться корпус робота).
- Портативный вакуумный пылесос (Vacuum Cleaner).
Внешний вид компонентов, необходимых для сборки данного робота-пылесоса, показан на следующем рисунке:

Портативный пылесос (Portable Vacuum Cleaner)
Для того, чтобы наш робот мог выполнять свою функцию по предназначению (то есть пылесосить помещение), в его составе должен быть портативный пылесос. Внешний вид подобного пылесоса показан на рисунке ниже. Этот пылесос имеет очень простой механизм. Он имеет три части внизу – небольшую камеру для сбора пыли, двигатель постоянного тока и вентилятор. Сверху пылесоса имеется контакт для подключения питания. Двигатель непосредственно запитывается от напряжения 3V (2 батарейки по 1,5 В формата AA) через простой выключатель. Поскольку мы будем запитывать все наше устройство от литий-ионной батареи 7.4V, мы можем отрезать провода пылесоса от его внутреннего источника питания и запитать его от напряжения 5V с нашей схемы. Таким образом, мы удалили все ненужные нам внутренности пылесоса и он стал выглядеть внутри так, как показано на следующем рисунке.

Ультразвуковой датчик HC-SR04

Для обнаружения роботом препятствий в нашем проекте мы будем использовать популярные ультразвуковые датчики HC-SR04. Принцип их работы достаточно прост: передающий модуль датчика излучает ультразвуковую волну, которая распространяется в окружающем пространстве, отражается от препятствия и улавливается (принимается) приемным модулем датчика, в результате чего на выходе датчика формируется импульс, равный времени распространения ультразвуковой волны до препятствия и обратно. Зная скорость распространения звука в воздухе, достаточно просто на основе этого времени определить расстояние до препятствия. Более подробно об определении расстояний с помощью данного ультразвукового датчика и платы Arduino можно прочитать в этой статье. Также на нашем сайте вы можете посмотреть все проекты, в которых для определения расстояния использовался ультразвуковой датчик HC-SR04.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.

Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.

Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
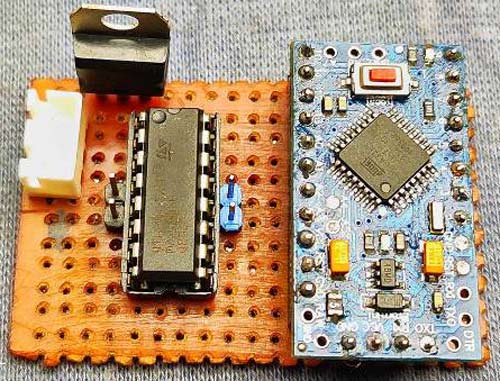
Сборка конструкции робота
Для спайки компонентов между собой мы использовали перфорированную плату. Эта часть работы очень проста, но к ней все равно необходимо отнестись с тщательностью. Для подключения платы Arduino pro mini мы использовали два контакта типа "мама" (female headers). После того как мы закончили пайку на перфорированной плате мы использовали соединительные провода для подключения ультразвуковых датчиков.
Изготовление корпуса для робота-пылесоса
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В коде программы мы не будем использовать никаких внешних библиотек, поскольку взаимодействие с датчиком HC-SR04 осуществляется достаточно просто. Первым делом в программе мы объявим переменные для взаимодействия контактами Echo и Trigger ультразвуковых датчиков. Первый датчик у нас стоит слева робота, второй – спереди, а третий – справа робота.
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн



Спасибо за участие и советы, я купил сл. лампы;6Н8С - 3 шт. и 6П3С - 4 шт. Схему я буду реализовывать, ту что мне дал "grach", правда она изначально была с фикс смещением, но после обсуждения на данном форуме решили сделать авто (потом в случаи необходимости добавлю трансформатор для фикс смещения). Вот схема так же заказаны на Али конденсаторы аудио. Жду когда все приедет и начну сборку. Жду комментарии, советы.

@olegscorpion Чем изобретать что-то из головы, почитай лучше, что люди в этом направлении делают реально. "Китай развернёт на орбите 1-ГВт солнечную электростанцию для передачи энергии на Землю. В Китае ещё три года назад был заложен проект наземной станции для принятия высокоэнергетического микроволнового излучения с орбиты… стройка будет завершена к концу текущего года. Цель — к 2030 году принимать энергию с 1-МВт орбитальной станции, а с 2049 — с 1-ГВт. Передача энергии с орбитальной станции на удалении 36 тыс. км будет свободна от проблем с облачностью и туманами (постоянными в Чунцине). Орбитальная солнечная электростанция будет 24 часа в сутки получать свет и полученное электричество в виде микроволнового излучения передавать на землю. Потери в атмосфере составят всего 2 %. Возобновление строительства опытной наземной станции не означает, что все проблемы решены. Остаются опасения, что микроволновая передача энергии может причинить вред здоровью местных жителей и создаст сильные помехи электронике и беспроводным каналам связи. " Кстати, ты обратил внимание на размеры антенн, указанные в книге, на которую ссылаешься? 100х100 м, причем обе, и передающая, и приемная. Это тебе не трансформатор Тесла.

Читайте также: